The Expansion Plate for pi-top [4] has inbuilt current limit protection so if using that you wouldn’t need to worry about motor damage. It’s quite funny that they call that motor “premium” - not entirely sure what’s premium about it…
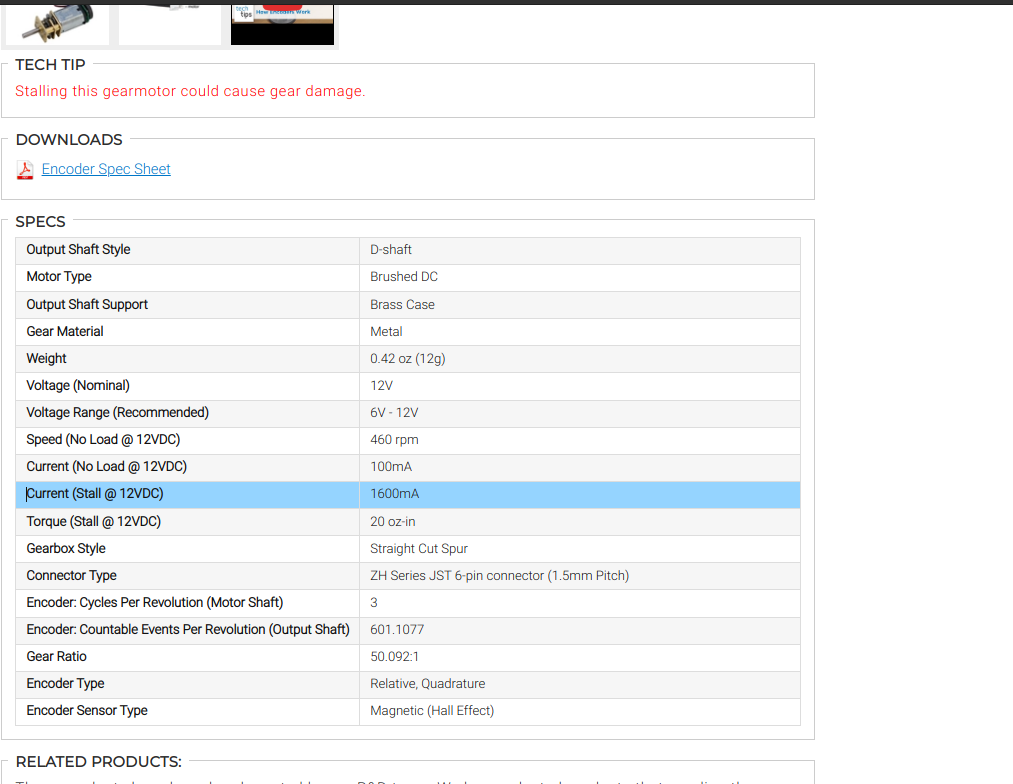
The Encoder Cycles per Revolution stated is also incorrect, it should be 12 based on the other data (not 3)
Having said that, their video on how encoders work is excellent - definitely the best explanation I’ve ever seen!
I am skeptical about the stall current stated here, our robotics kit motor has 3-4x the torque and the stall current we have is 1000mA - so I wouldn’t worry too much about that current
Thank you for your link to the ServoCity’s N20 motor spec. I noticed that their N20 motors are professional, premium motors for RC, comparing to the consumer or toy class, and much cheaper/cost effective motors I am playing with.
In other words, you have not misunderstood anything, it is my ignorance on professional grade stuff. My apologies for misleading you.
One more friendly reminder is that we don’t usually stress motors to their extreme overload limit, or near the stall current limit.
You might have see the vendors warning on overloading motors. Actually I have permanently damaged a couple of N20 motor gear boxes these few years.
By the way, I usually go to the hobbyist motors expert Pololu to find useful information, comparison, and selection:
N20 Gear motor comparsion - Pololu
Another thing is that the Pololu N20 gear motors are max around 1.2W. So don’t expect high power for this mini gear power.
So I’m finally back to working on this project and I made a discovery I just wanted everyone to know. The hex couplings I linked above are a REALLY tight fit for the most recent robotmaster mecanum wheels. But a tiny amount of oil and a rubber mallet got the job done.
Yeah I had the same problem actually, however your rubber mallet approach sounds quite sophisticated compared to my technique of slamming it onto a concrete floor with my hand