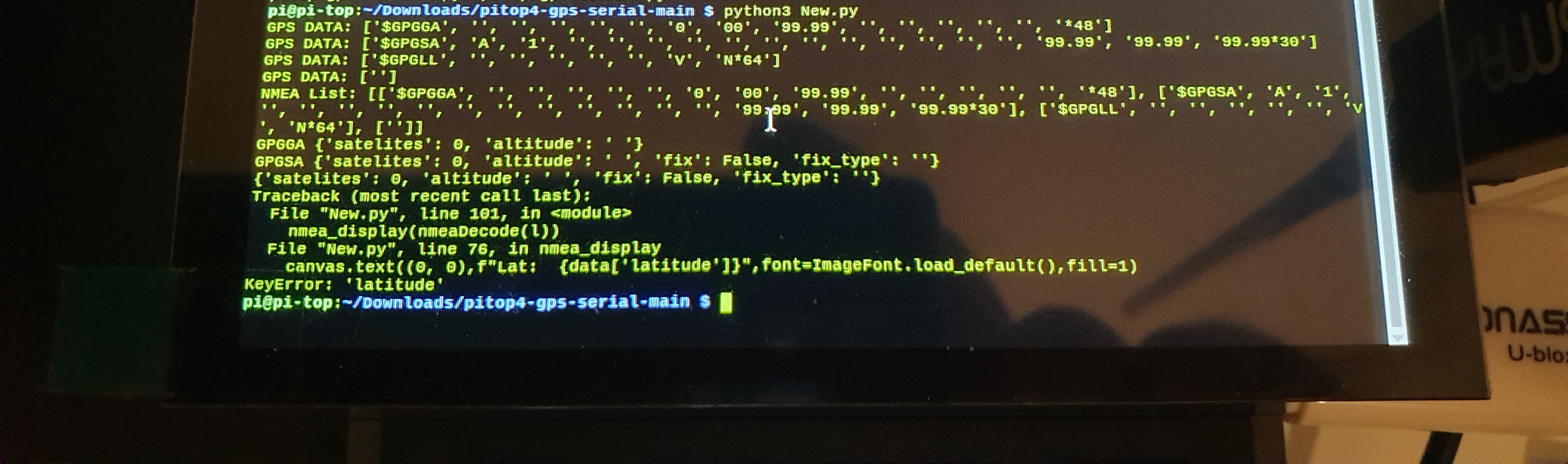
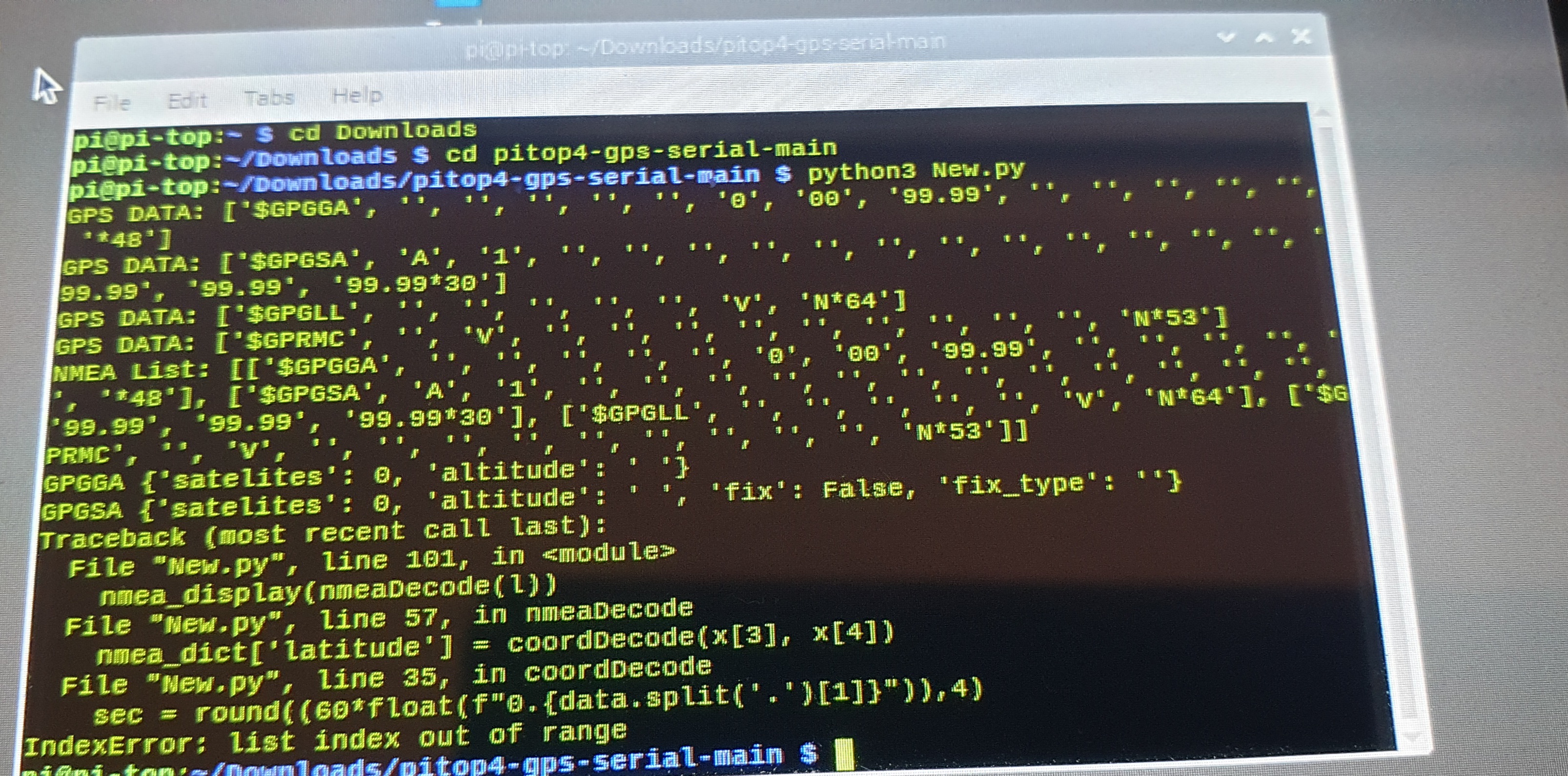
@Luis try running this and screenshot the print statements
I also forgot to add the KeyboardInterupt (ctrl+c) exception which clears the screen and exits the script
import io
import serial
from pitop.miniscreen import Miniscreen
from PIL import Image, ImageDraw, ImageFont
# Serial setup
serialConf = serial.Serial('/dev/ttyAMA0', 9600,timeout=0.3)
serialio = io.TextIOWrapper(io.BufferedRWPair(serialConf, serialConf))
# Enable only NMEA sentences required
serialConf.write(b'$PMTK314,0,1,0,1,1,0,0,0,0,0,0,0,0,0,0,0,0,1*34\r\n')
# pi-top[4] Miniscreen setup
ms = Miniscreen()
image = Image.new(ms.mode, ms.size,)
canvas = ImageDraw.Draw(image)
ms.set_max_fps(1)
# NMEA sentences required
nmea_list = ['$GPGGA', '$GPGSA', '$GPRMC', '$GPZDA']
def speedCalc(data, u):
#converts speed to user required units
if u == 1:
return f'{round((float(data) * 1.150779448),1)} MPH'
elif u == 2:
return f'{round((float(data) * 1.852),1)} KM/H'
elif u == 3:
return f'{round((float(data) * 1.943844),1)} m/s'
else:
return f'{round(float(data),1)} kn'
def coordDecode(data, b):
#decodes lat and lon co-ordinates from GPS NMEA
sec = round((60*float(f"0.{data.split('.')[1]}")),4)
return f"{data.split('.')[0][0:-2]}{b} {data.split('.')[0][-2:]}m {sec}s "
def nmeaDecode(data):
#create dictionary to put data into
nmea_dict = {}
# for each NMEA sentence, extract the data required
# and add it to the dictionary
for x in data:
if x[0] == '$GPGGA':
nmea_dict['satelites'] = int(x[7])
nmea_dict['altitude'] = f'{x[9]} {x[10]}'
print(f'GPGGA {nmea_dict}')
elif x[0] == '$GPGSA':
nmea_dict['fix'] = True if int(x[2]) > 1 else False
nmea_dict['fix_type'] = f'{x[2]}D' if int(x[2]) > 1 else ''
print(f'GPGSA {nmea_dict}')
elif x[0] == '$GPRMC':
#decodes lat and lon to degrees and mins
nmea_dict['latitude'] = coordDecode(x[3], x[4])
nmea_dict['longitude'] = coordDecode(x[5], x[6])
# for speed, it can be calculated in MPH, KM/H, m/s Knots
# 1 = MPH | 2 = KM/H | 3 = m/s | any other no. for knots
nmea_dict['speed'] = speedCalc(x[7], 1)
print(f'GPRMC {nmea_dict}')
elif x[0] == '$GPZDA':
# gets the date and time from GPS
nmea_dict['date_time'] = f'{x[2]}/{x[3]}/{x[4][-2:]} {x[1][0:2]}:{x[1][2:4]}:{x[1][4:6]}'
print(f'GPZDA {nmea_dict}')
print(nmea_dict)
# return the dictionary
return nmea_dict
def nmea_display(data):
# displays the required GPS data
# to the pi-top[4] miniscreen
canvas.rectangle(ms.bounding_box, fill=0)
canvas.text((0, 0),f"Lat: {data['latitude']}",font=ImageFont.load_default(),fill=1)
canvas.text((0, 12),f"Lon: {data['longitude']}",font=ImageFont.load_default(),fill=1)
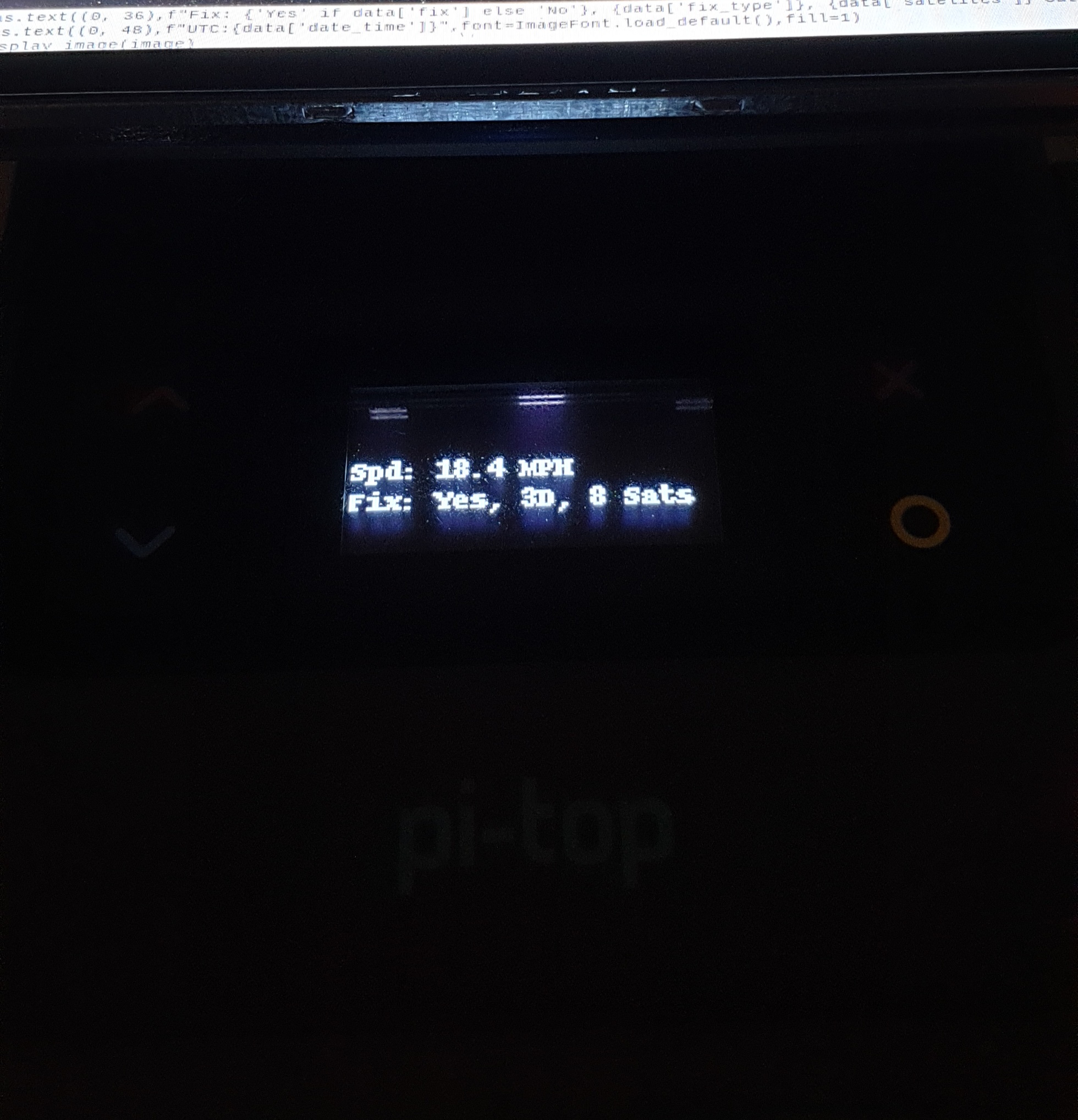
canvas.text((0, 24),f"Spd: {data['speed']}",font=ImageFont.load_default(),fill=1)
canvas.text((0, 36),f"Fix: {'Yes' if data['fix'] else 'No'}, {data['fix_type']}, {data['satelites']} Sats",font=ImageFont.load_default(),fill=1)
canvas.text((0, 48),f"UTC:{data['date_time']}",font=ImageFont.load_default(),fill=1)
ms.display_image(image)
while 1:
try:
# create a list for NMEA sentences
l=[]
# Get NMEA sentence
s = serialio.readline().strip().split(',')
# look for the start of the sentence queue
if s[0] =='$GPGGA':
# get all the sentences that matches the list
for x in nmea_list:
print(f'GPS DATA: {s}')
# add sentence to the list
l.append(s)
# get next sentence
s = serialio.readline().strip().split(',')
# decode the NMEA sentences and display the information
# on the pi-top[4] miniscreen
print(f'NMEA List: {l}')
nmea_display(nmeaDecode(l))
# This exeption is to prevent the script from crashing if there
# is some garbled GPS data that cannot be decoded to UTF-8
# this normally happens at the start of running the script
# and is away of ignoring it
except UnicodeDecodeError as e:
continue
except KeyboardInterrupt:
ms.clear()
exit()