Hi, I’m planning to start using the robot kit and want to do a mecanum wheel build, but I need more motors.
Is the motor cable a 6 pint JST connector?
Has anyone found a motor that works well?
I like the rev robotic motors but they are 2 and 4 pin configurations. I haven’t been able to find an adapter and I’m trying to avoid soldering my own if I can.
I was looking at these motors from servo city, they are 6 pin but I haven’t checked the pi top schematic to make sure the pins match up yet.
Anyone have any luck here? Hell can anyone point me to the motors the pi top ships with. I could always use two more, it might be easier to match the shafts with my mecanum wheels
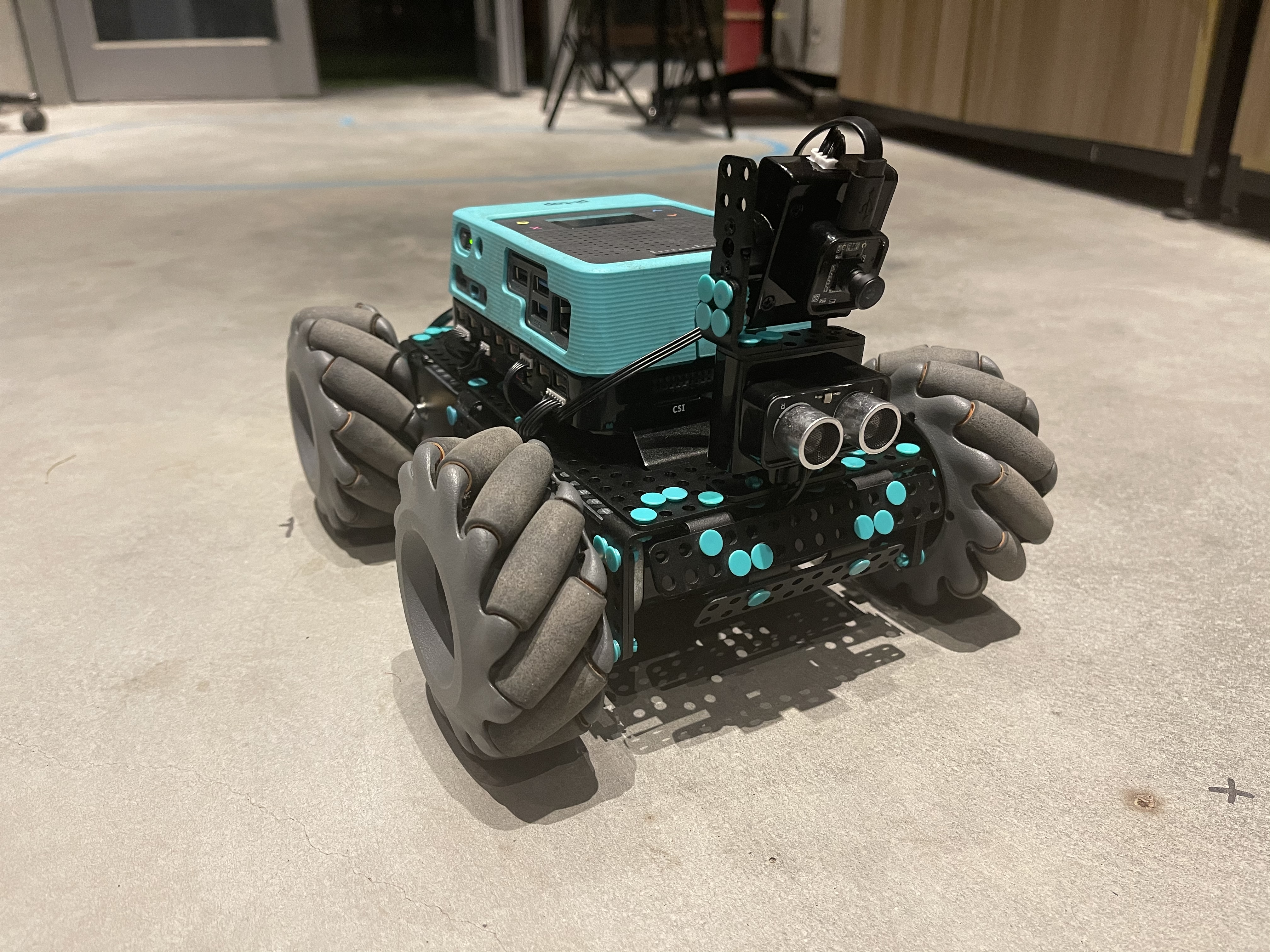
For this I used two extra pi-top motors as it made it pretty straightforward to build because of the rivet system, unfortunately these are not currently available for sale but will be in the next couple of months - the only way to get them now is to have a second robotics kit. I’ve asked a colleague to see if we have any spare stock that we can sell before they are added to the website
I also wrote some of the software required for it, here’s the drive controller:
And here’s a web interface for controlling it from a browser:
Please note, none of this is in the master branch of the SDK, so you’d have to clone this branch and install it in its entirety to use.
In terms of pinout and connectors, I believe the motors you linked are the same and would be compatible - the only thing that can’t be guaranteed is the hall effect encoder system. We use 52 pulses per rotation of the motor so you may have to scale things accordingly if it’s not the same (or modify the SDK).
The extra pi-top motor would be the simplest. (I just ordered another robotics kit, which is cool as I have 2 pitops anyway.) Are those robotmaster S1 mecanum wheels? Do they fit the Pi-top motor axles, or did you have an interface. I have a full set of rev robotics mecanum wheels I was thinking of using - but I’ll likely need some type of hub/axle connector.
Yeah these are from the Robomaster - they fit onto the same 12mm brass hex fittings the pi-top wheels use but I had to get some longer ones because of the wheel width difference. I can measure what size I used when I’m back in the office and let you know, should be fairly easy to buy.
No worries! We’re hosting pi-top Sessions this Friday and it’s a Robotics Kit special, if you have time it might be interesting for you to come along as there’s a lot of other cool stuff being worked on - here’s the signup link, it’s at 5 PM GMT
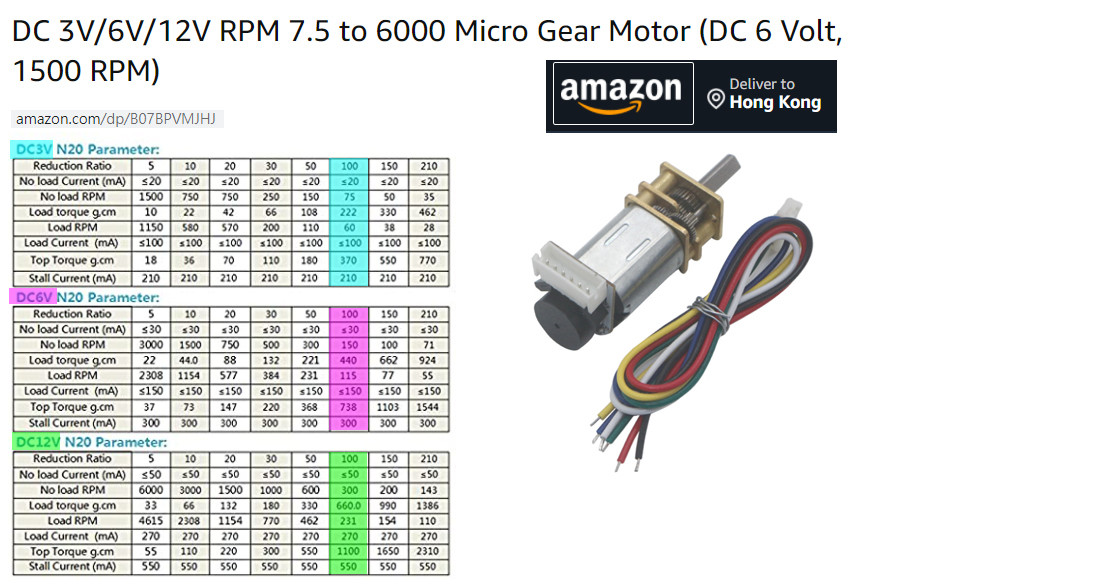
I have a couple of these little N20 gear motors lying in my junk box for some years now, collecting dust.
I once used Raspberry Pi and the bulky L298N motor driver board to control it and found it OK. Now I am thinking of using Rpi Pico with a smaller motor controller.
My long term objective is to make a robot car as small as possible.
Update 2021jun30hkt1130
I am thinking of using Rpi Pico to control the N20 motor, as described in the following Tom’s Hardware article.
Isn’t the power supply from the battery underpowered - if one wanted to get maximum performance from these motors?
The pi-top lithium battery is rated in specs :
38.85 Watt-hour - (11.1V, 3500mAH)
Each of the n20 Gear is rated:
Voltage (Nominal) - 12V
Current (Stall @ 12VDC) - 1600mA
I’m assuming this means max possible wattage for each motor at max would be
12V x 1.6A = 19.2 watts
With two of these, we’re already at 38.4 watts.
With 4 motors it would be 76.8 watts of power… which is much more than the pi-top battery is rated.
How could we provide motors with enough juice to get maximum output possible?
Those are the pi-top [3] specs, pi-top [4] ones are here
In terms of the maximum power, you are mixing watt-hours and watts. I believe we limit the maximum current from the battery pack at 2C, which means 2 multiplied by the Ah rating. This would give a maximum current output from the pi-top [4] as 2.6 * 2 = 5.2A @ the battery voltage. Taking the nominal battery voltage to 7.4V you can get 38.48 watts