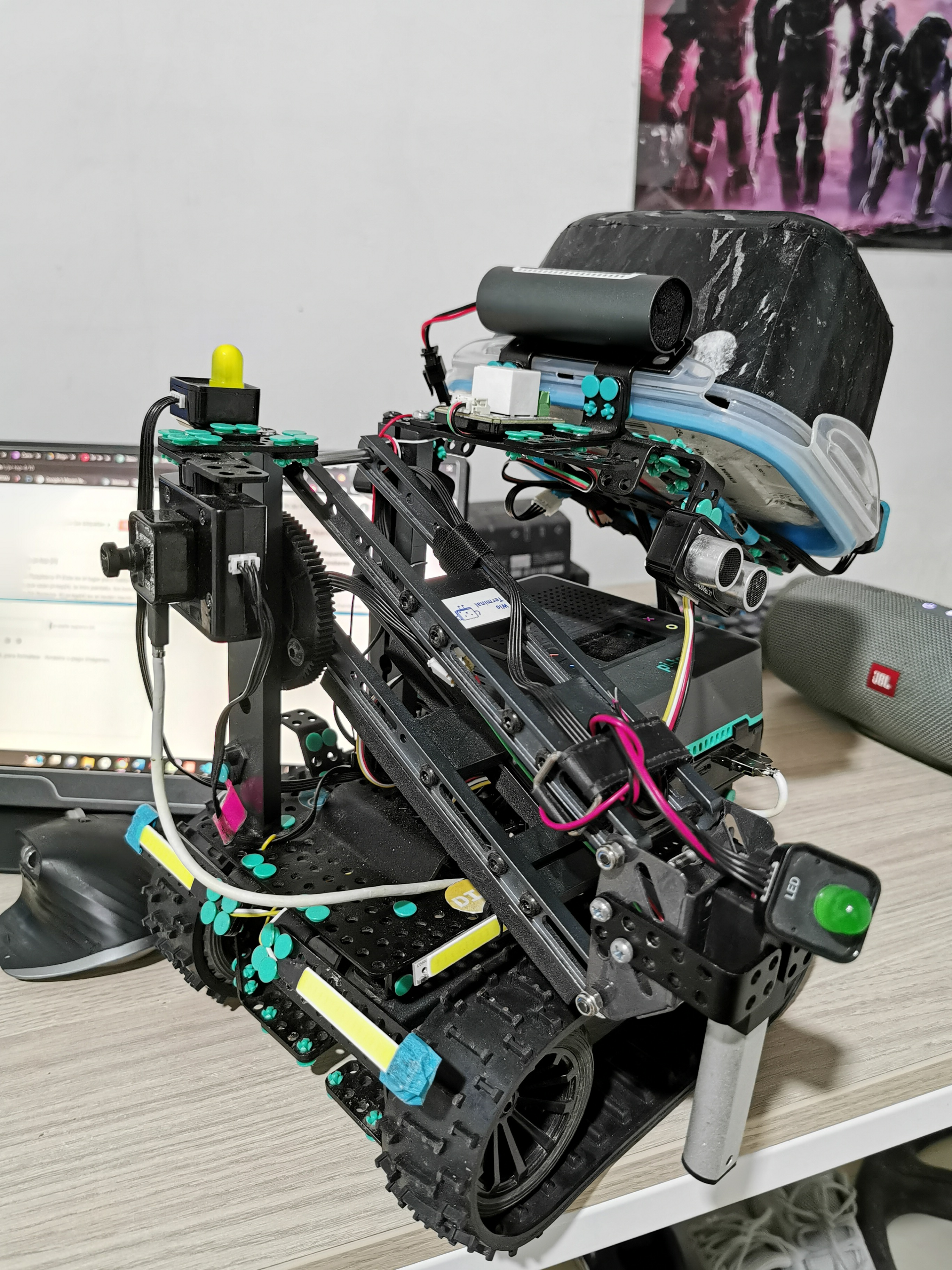
Hello, I’m currently developing a robot to measure the air and soil quality in my father’s crops. My goal is to make the robot move autonomously by assigning it routes through GPS coordinates, allowing it to perform measurements at regular intervals. To achieve this, I would like to control the motors based on the existing code of the robot controlled by the web server.
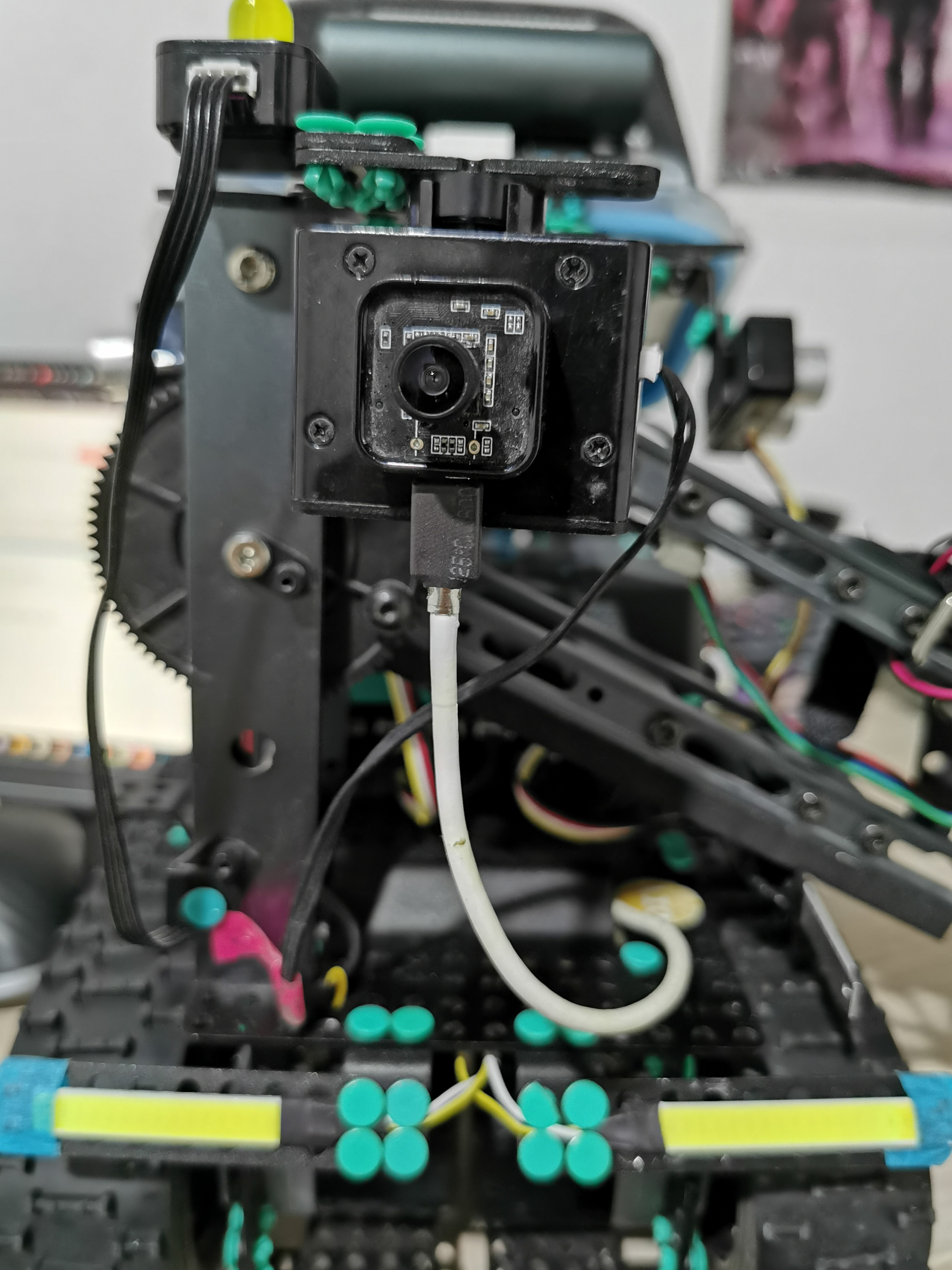
Additionally, I want to invert the camera’s vision since the camera’s connection is reversed, causing the image to be displayed upside down. This is important to ensure accurate measurements and visualization. 
I’m looking forward to implementing these improvements in my robot and maximizing its efficiency in data collection in the crops.