Hi all!
Now that the pi-top [4] Robotics Kit is out in the wild, we’re releasing challenges in Further that we’d love to get your feedback on!
The challenges are built with beginners in mind, but they should still be quite interesting regardless of your skill level. Even if you are a robotics expert, they’ll at the very least introduce you to some of the functionality available in our Python SDK that you can use in your own projects.
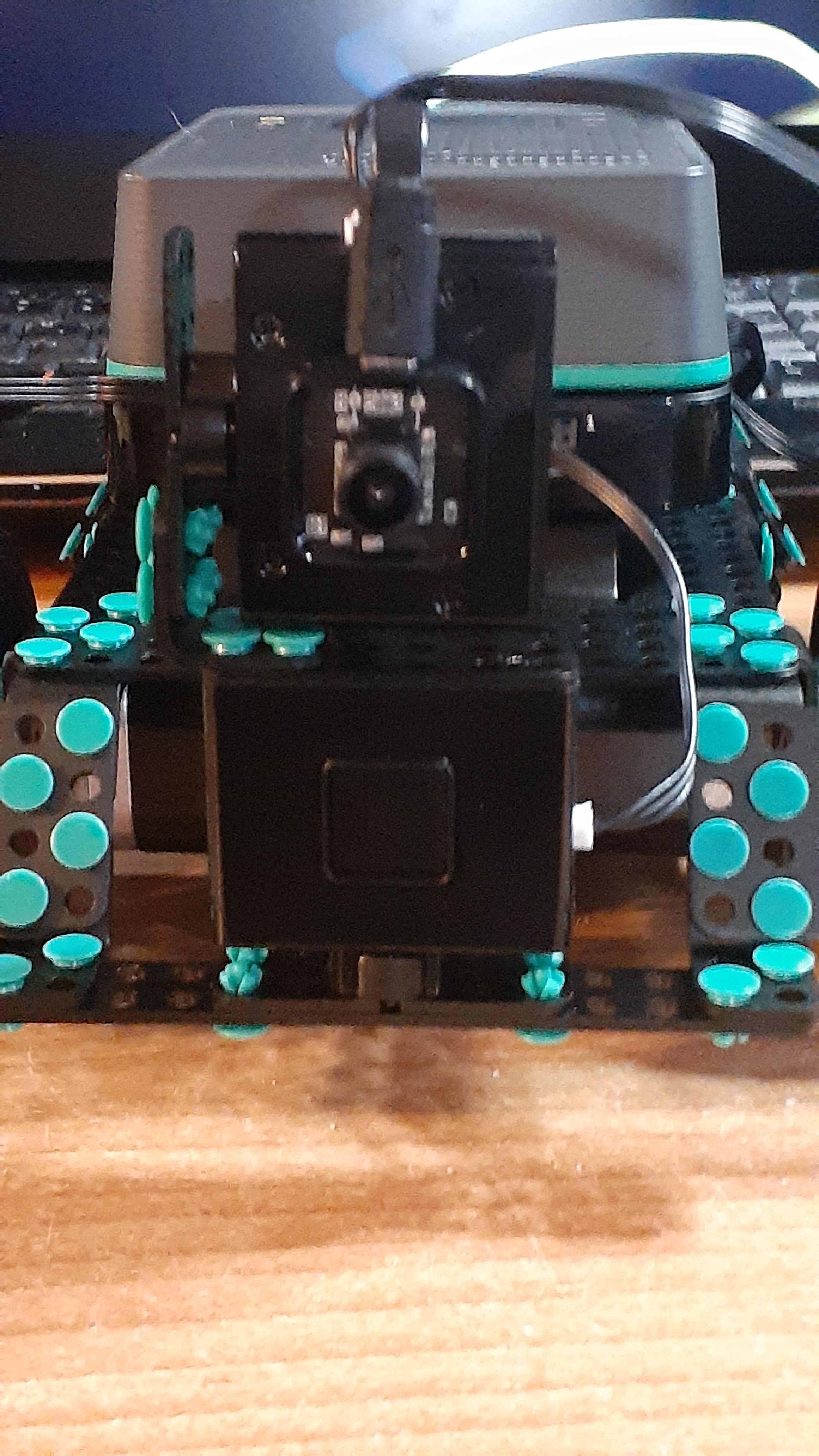
The first series we are releasing goes through, step-by-step, building an OpenCV-based line follower with the Alex Robot.
You can check them out here and we’ll be adding more over the coming weeks.
Feel free to ask for help on completing any of the challenges in this topic. If you spot any bugs or have any feedback we’d love to hear it!