With @wil coming up with the Universal Interface PCB and got my hands on one to play around with/test and offer feedback. I am sure others have one too, so lets discuss it here
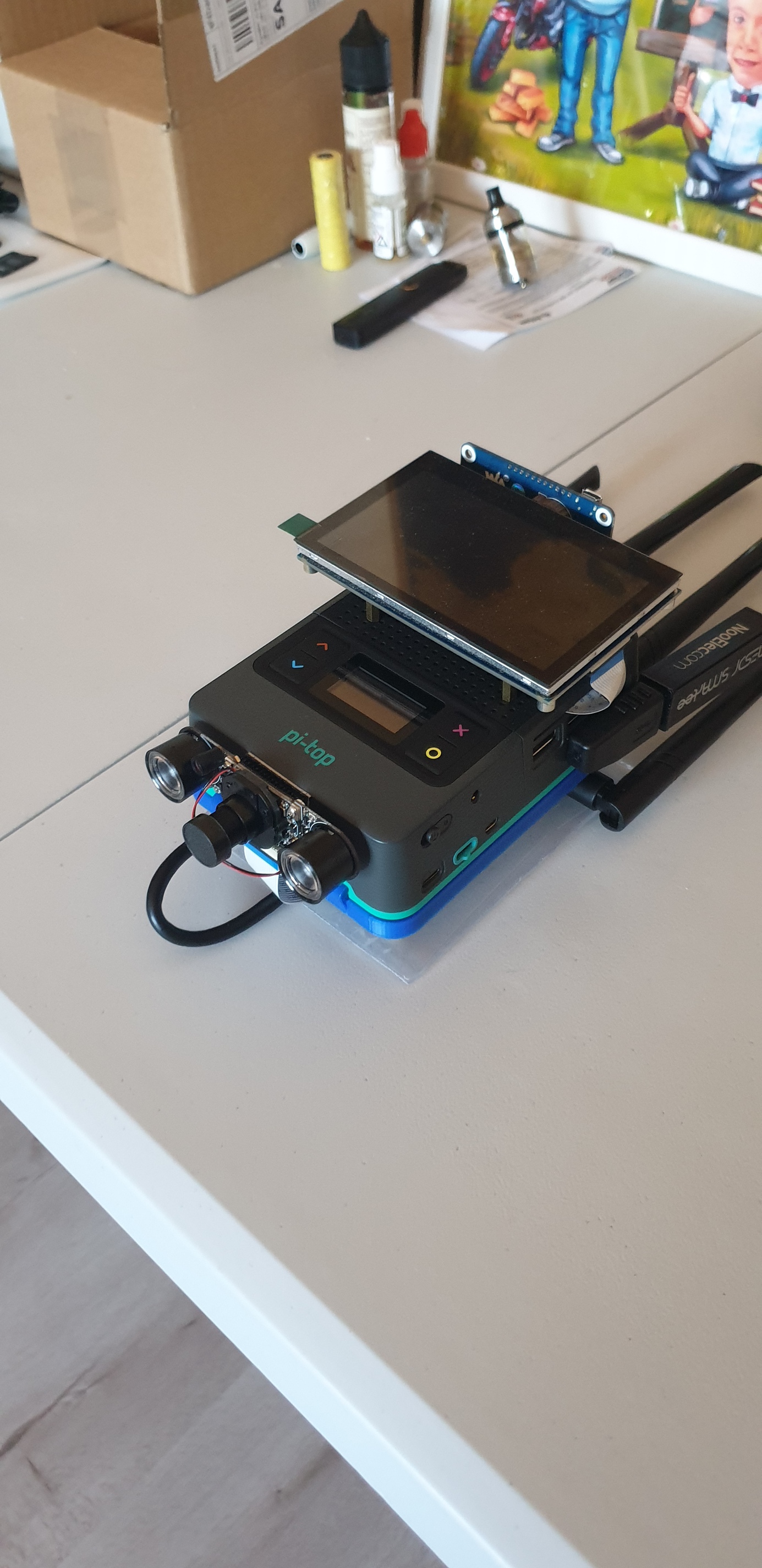
So I got one and got myself some Grove sensors and put this together.
Hardware
- Grove 16x2 LCD - plugged into I2C
- Grove DHT11 - Plugged into D1
- pi-top button = plugged into D0
- Adafruit Ultimate GPS Breakout v3 - Plugged into GPIO
I did use some Grove Libraries because I don’t really know I2C and wanted to get something working
It’s nothing special, set it up to show some text and push a button to change the text or display sensor data. Sadly I really do not know how to use the Analogue or I would have used that too. hoping @wil can help out here or let us know some documentation or something, I tried using the pi-top SDK but it would not let me as I needed the foundation plate plugged in

just wondering a few things
- The USB socket, What’s that for? is it just power in or out?
- The pins in the middle, is that for power in and out? like the pads next to them
- How do I get A0 and A1 working exactly?
Overall I like the board and looking to do more with it, think my plan is to do a long term project with it to see how it works for more than a short demo or testing but I think it will be ok.
What to I have planned for the board? well i would like to make a Personal Weather Station and integrate it to the Weather Channel personal weather station network, something like this bit incorporate solar and run from battery
https://projects.raspberrypi.org/en/projects/build-your-own-weather-station


 Sorry about that, I’m sure I would have saved you some time had I remembered to warn you!
Sorry about that, I’m sure I would have saved you some time had I remembered to warn you!