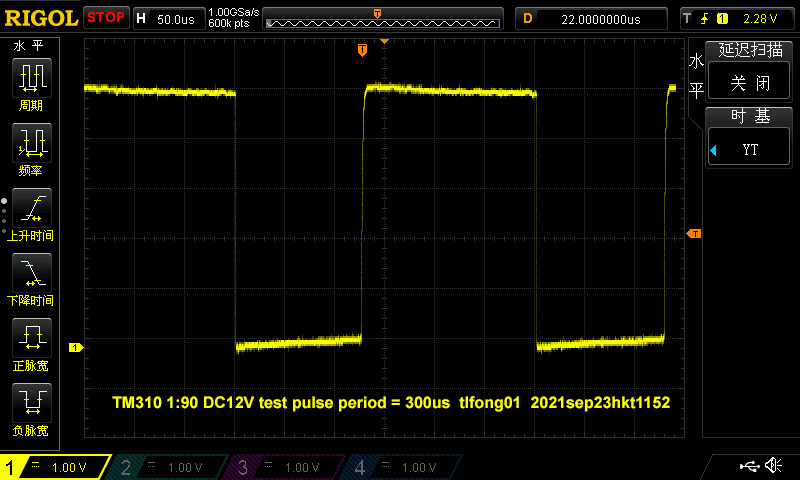
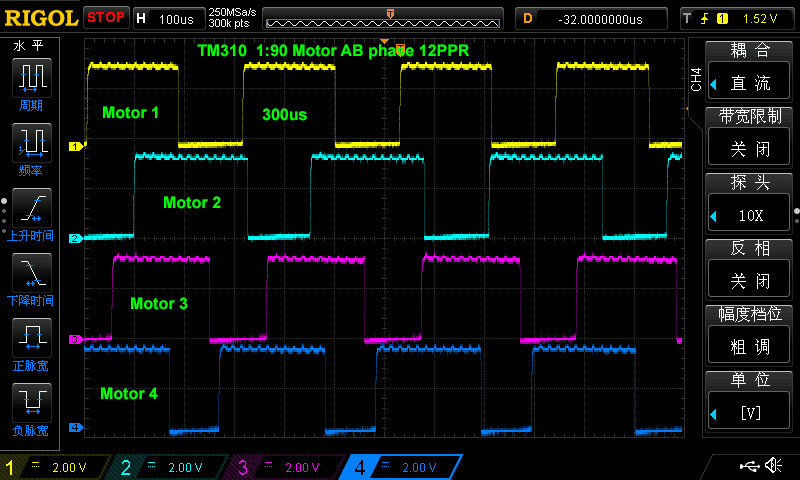
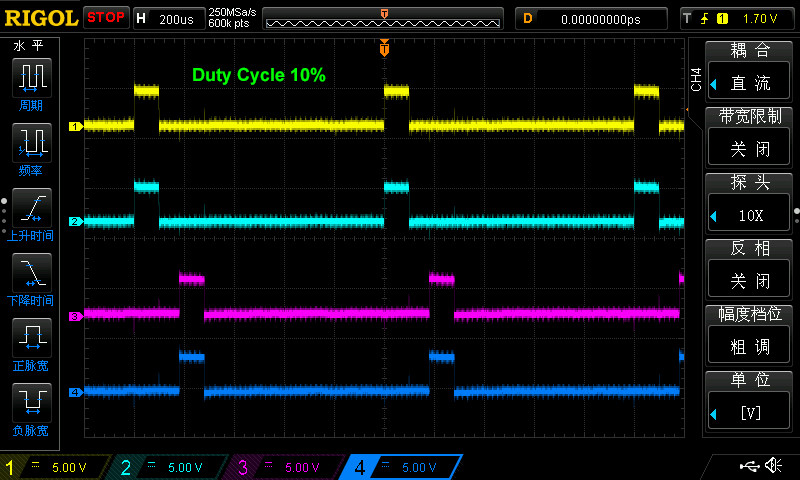
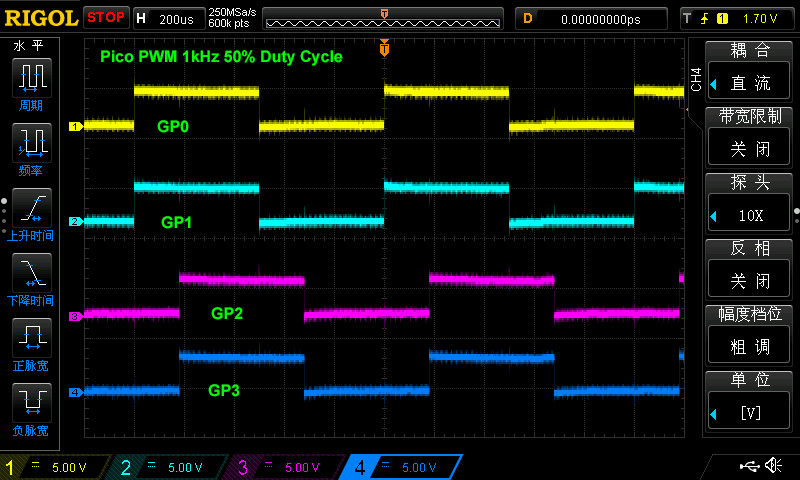
Choosing an optimum duty cycle for calibration/benchmarking
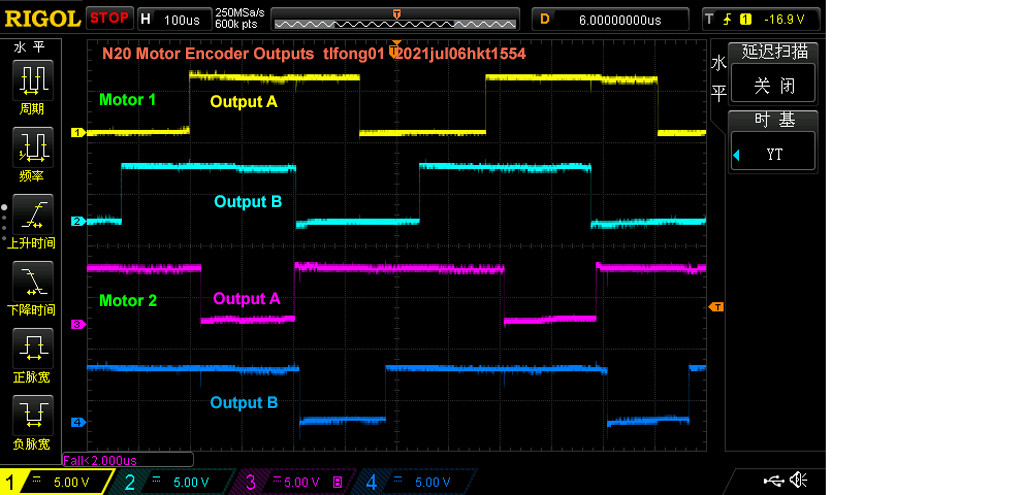
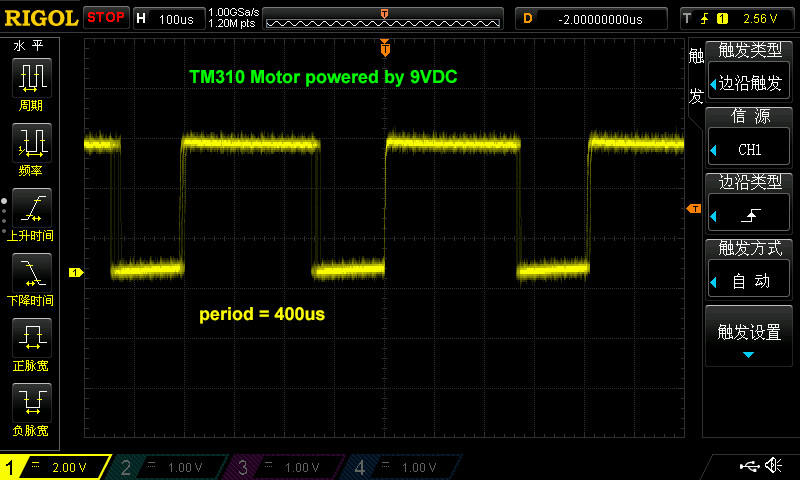
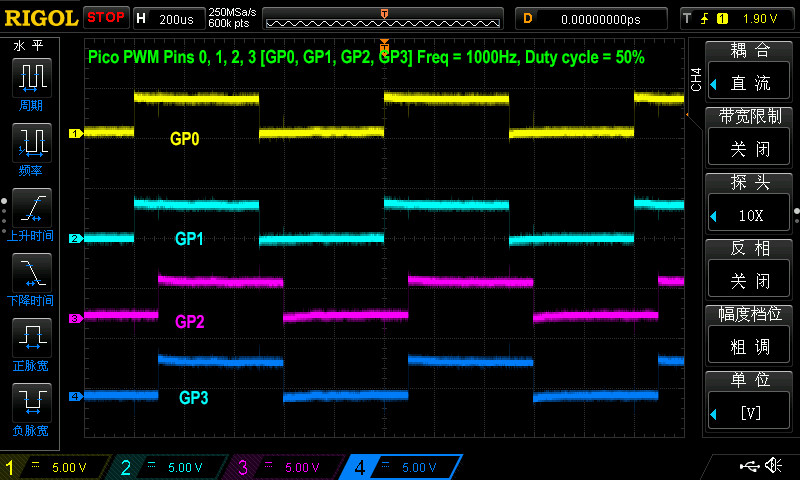
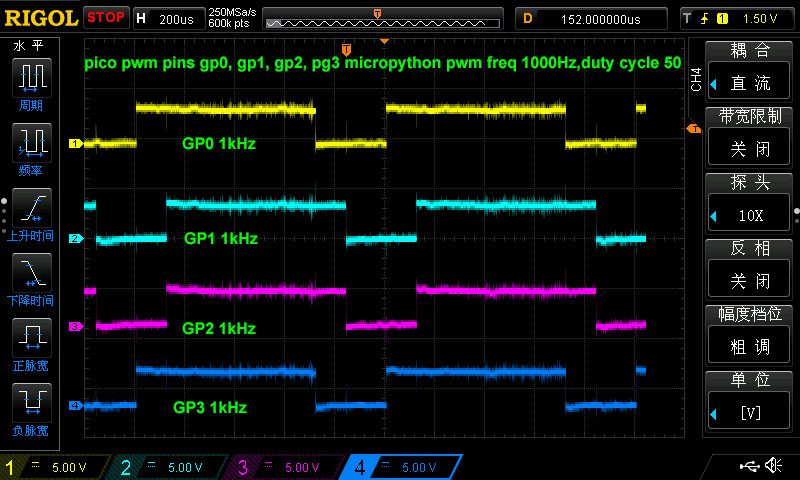
I found low duty cycles like 20% and 25% not satisfactory, because one of the four motors sometimes gets stuck. A 50% duty cycle is more smooth and repeatable. A 50% measurement is shown below:
>>> %Run -c $EDITOR_CONTENT
setupPwmPinNumList(), ...
pwmPinNumList = [0, 1, 2, 3]
pwmFreqList = [1000, 1000, 1000, 1000]
pwmDutyCycleList = [50, 50, 50, 50]
testCountIntPinNumListIntOneTenthSecond()
ppsList = [32, 24, 28, 25] , min 24 , max 32 , dif 8 , avg 27
ppsList = [39, 26, 29, 23] , min 23 , max 39 , dif 16 , avg 29
ppsList = [31, 28, 28, 21] , min 21 , max 31 , dif 10 , avg 27
ppsList = [31, 28, 26, 16] , min 16 , max 31 , dif 15 , avg 25
ppsList = [31, 26, 34, 22] , min 22 , max 34 , dif 12 , avg 28
ppsList = [29, 26, 27, 19] , min 19 , max 29 , dif 10 , avg 25
ppsList = [28, 28, 24, 20] , min 20 , max 28 , dif 8 , avg 25
ppsList = [30, 24, 24, 28] , min 24 , max 30 , dif 6 , avg 26
ppsList = [33, 27, 18, 22] , min 18 , max 33 , dif 15 , avg 25
ppsList = [31, 26, 24, 19] , min 19 , max 31 , dif 12 , avg 25
ppsList = [28, 22, 25, 22] , min 22 , max 28 , dif 6 , avg 24
ppsList = [32, 21, 27, 32] , min 21 , max 32 , dif 11 , avg 28
ppsList = [34, 23, 27, 22] , min 22 , max 34 , dif 12 , avg 26
ppsList = [28, 24, 25, 20] , min 20 , max 28 , dif 8 , avg 24
ppsList = [36, 23, 31, 21] , min 21 , max 36 , dif 15 , avg 27
ppsList = [32, 26, 26, 23] , min 23 , max 32 , dif 9 , avg 26
ppsList = [32, 27, 23, 23] , min 23 , max 32 , dif 9 , avg 26
ppsList = [32, 24, 26, 23] , min 23 , max 32 , dif 9 , avg 26
ppsList = [30, 23, 30, 27] , min 23 , max 30 , dif 7 , avg 27
ppsList = [33, 26, 28, 23] , min 23 , max 33 , dif 10 , avg 27
>>>
'''
This is a full listing of the code, with sample results.
# *** pwm_int_48.py - pwm and interrupt testing, tlfong01, 2021oct05hkt2031 ***
from machine import Pin, PWM
import utime
# ========= ========= ========= ========= ========= ========= ========= =========
# ========= ========= ========= ========= ========= ========= ========= =========
# Conents
#
# Part 1 - Interrupt Functions
# 1.1 Using GP4, 5, 6, 7 input pins to detect and count mtor encoder A signals and calculate motor speed
# Part 2 - PWM Functions
# 2.1 Using PWM pin to fade in and fade out the system LED
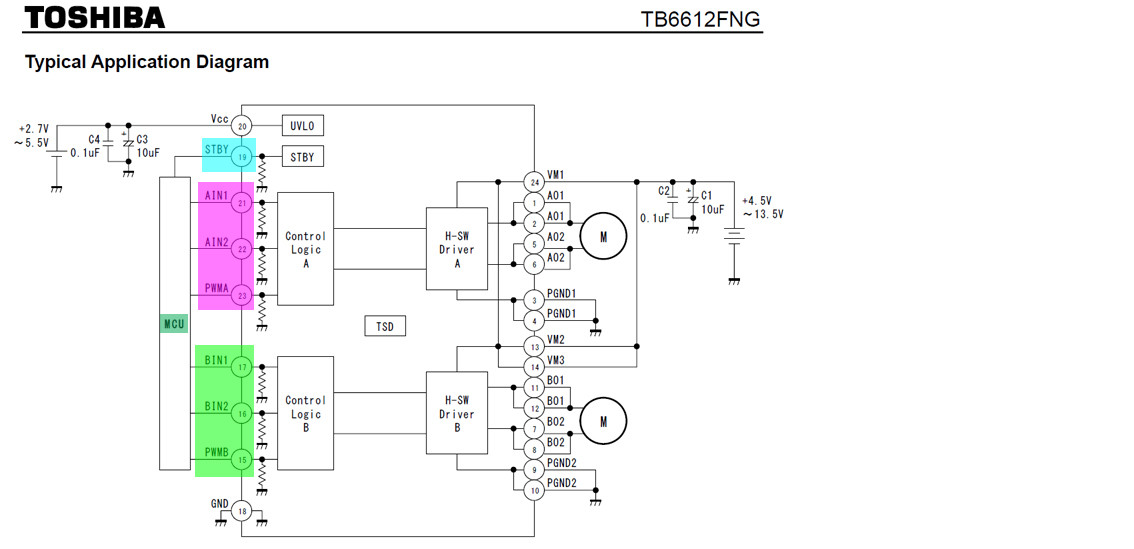
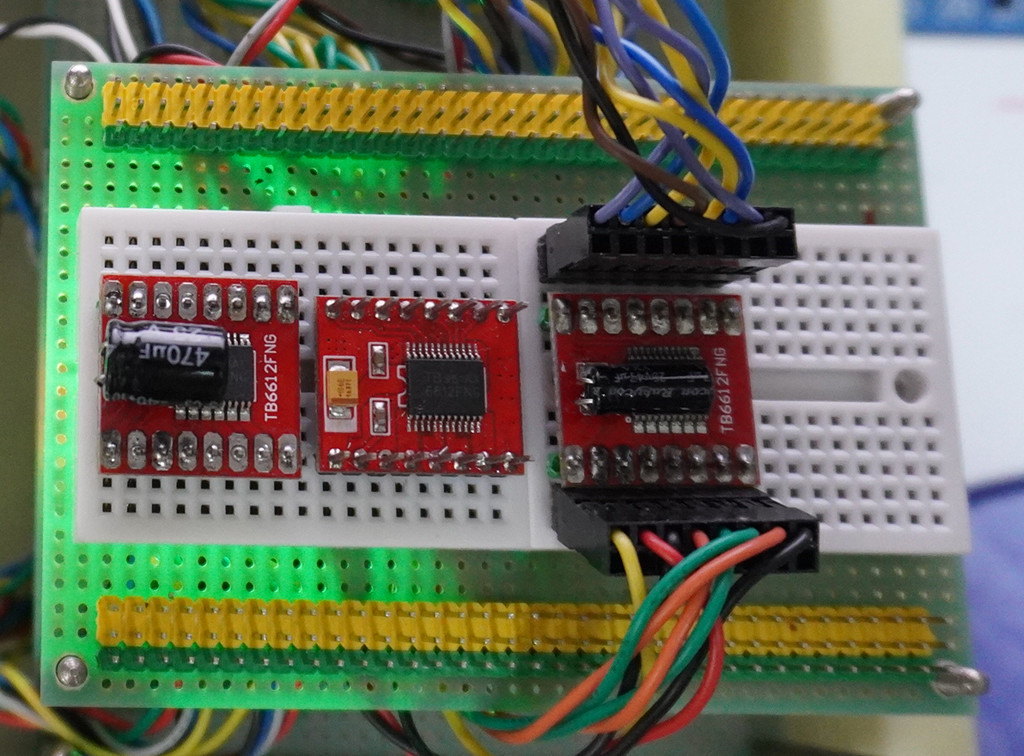
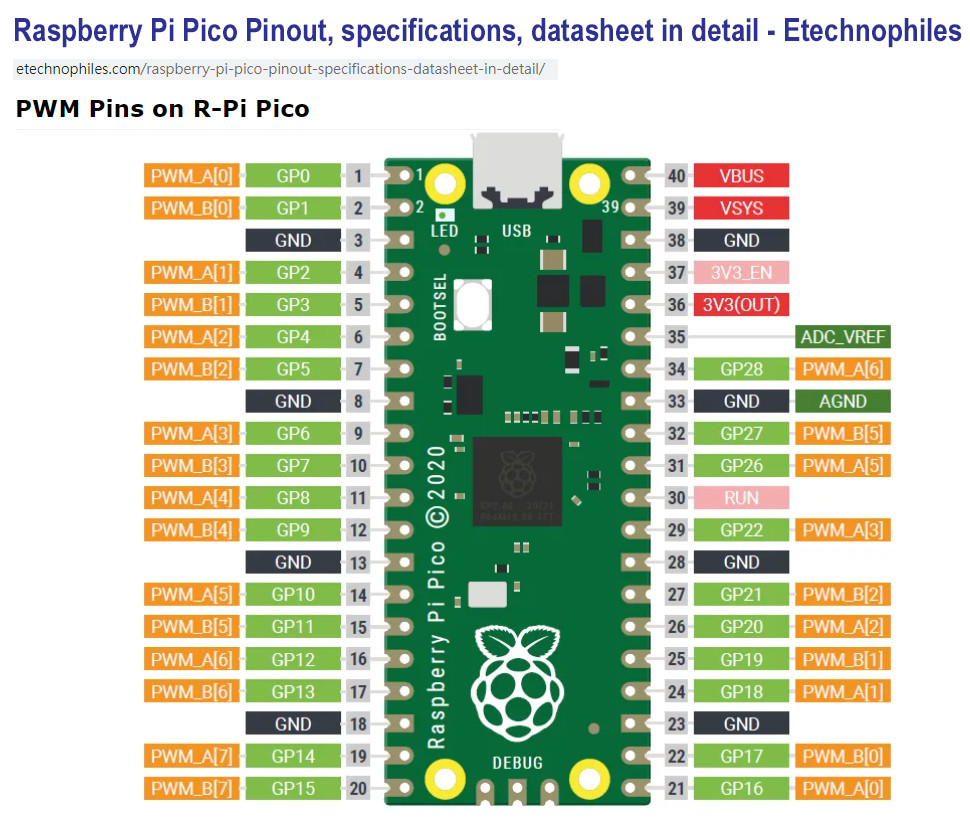
# 2.2 Using GP 0, 1, 2, 3 pins' PWM signals to control the speed of TB6612FNG driving TM310 DC motor
# ========= ========= ========= ========= ========= ========= ========= =========
# ========= ========= ========= ========= ========= ========= ========= =========
# Interrupt functions for multiple (4) interrupt pins GP 4, 5, 6, 7 ***
intPinNum0 = 4 #GP4
intPinNum1 = 5 #GP5
intPinNum2 = 6 #GP6
intPinNum3 = 7 #GP7
intPinNumDict = {'0': 4,
'1': 5,
'2': 6,
'3': 7,
}
intPinNumList = [intPinNum0, intPinNum1, intPinNum2, intPinNum3]
intPin0 = Pin(intPinNum0, Pin.IN, Pin.PULL_DOWN)
intPin1 = Pin(intPinNum1, Pin.IN, Pin.PULL_DOWN)
intPin2 = Pin(intPinNum2, Pin.IN, Pin.PULL_DOWN)
intPin3 = Pin(intPinNum3, Pin.IN, Pin.PULL_DOWN)
intPinDict = {
'0': intPin0,
'1': intPin1,
'2': intPin2,
'3': intPin3,
}
global intCount0
global intCount1
global intCount2
global intCount3
intCount0 = 0
intCount1 = 0
intCount2 = 0
intCount3 = 0
intCountDict = {
'0': intCount0,
'1': intCount1,
'2': intCount2,
'3': intCount3,
}
def intCallBack0(pin):
global intCount0
intCount0 = intCount0 + 1
return
def intCallBack1(pin):
global intCount1
intCount1 = intCount1 + 1
return
def intCallBack2(pin):
global intCount2
intCount2 = intCount2 + 1
return
def intCallBack3(pin):
global intCount3
intCount3 = intCount3 + 1
return
intCallBackDict = {
'0': intCallBack0,
'1': intCallBack1,
'2': intCallBack2,
'3': intCallBack3,
}
intPin0.irq(intCallBack0, Pin.IRQ_FALLING)
intPin1.irq(intCallBack1, Pin.IRQ_FALLING)
intPin2.irq(intCallBack2, Pin.IRQ_FALLING)
intPin3.irq(intCallBack3, Pin.IRQ_FALLING)
def countIntPinIntCountTime(intPinNum, countTime):
global intCount0
global intCount1
global intCount2
global intCount3
intCount0 = 0
intCount1 = 0
intCount2 = 0
intCount3 = 0
utime.sleep(countTime)
if intPinNum == 0:
intCount = intCount0
elif intPinNum == 1:
intCount = intCount1
elif intPinNum == 2:
intCount = intCount2
else:
intCount = intCount3
return intCount
def countIntPinIntOneTenthSecond(intPinNum):
intCount = countIntPinIntCountTime(intPinNum = intPinNum, countTime = 0.01)
return intCount
def countIntPinNumListIntOneTenthSecond(intPinNumList):
intCountList = [0] * len(intPinNumList)
for index in range(len(intPinNumList)):
intCountList[index] = countIntPinIntOneTenthSecond(intPinNumList[index])
return intCountList
# *** Test functions ***
def repeatCountIntPinNumListIntOneTenthSecond(intPinNumList, repeatTimes, pauseTime):
print('\n testCountIntPinNumListIntOneTenthSecond()')
for count in range(repeatTimes):
ppsList = countIntPinNumListIntOneTenthSecond(intPinNumList)
print(' ppsList =', ppsList, end = '')
print(' , min ', min(ppsList), end = '')
print(' , max ', max(ppsList), end = '')
print(' , dif ', max(ppsList) - min(ppsList), end = '')
print(' , avg ', int(sum(ppsList) / len(ppsList)))
'''
rpmList = ppsList.copy()
for index in range(len(rpmList)):
rpmList[index] = int(((rpmList[index] / 12) / 90) * 10 * 60)
print(' rpmList =', rpmList, end = '')
print(' , min ', min(rpmList), end = '')
print(' , max ', max(rpmList), end = '')
print(' , avg ', int(sum(rpmList) / len(rpmList)))
'''
utime.sleep(pauseTime)
return
# *** Sample Test ***
#repeatCountIntPinNumListIntOneTenthSecond(intPinNumList = [0, 1, 2, 3], repeatTimes = 4, pauseTime = 0.5)
# ========= ========= ========= ========= ========= ========= ========= =========
# ========= ========= ========= ========= ========= ========= ========= =========
# *** Part 2 - PWM Functions ***
def pwmSystemLed():
systemLedPinNum = 25
pwmPin = PWM(Pin(systemLedPinNum))
pwmPin.freq(1000)
for count in range(4):
for dutyCycle in range(65025):
pwmPin.duty_u16(dutyCycle)
utime.sleep(0.0001)
for dutyCycle in range(65025, 0, -1):
pwmPin.duty_u16(dutyCycle)
utime.sleep(0.0001)
return
def testPwmSystemLed():
print('testPwmSystemLed(), ...')
print(' System LED now fades in and out a couple of times')
pwmSystemLed()
print(' End of test.')
return
# *** Sample Test ***
#testPwmSystemLed()
# ========= ========= ========= ========= ========= ========= ========= =========
# ========= ========= ========= ========= ========= ========= ========= =========
# *** Setup 4 PWM Pins ***
# Notes:
# 1. Setting up GP 0, 1, 2, 3 as pwm pins at 1 kHz, 50% duty cycle
# 2. Connecting the pwm pins to the pwm inputs of TB6612FNG move the DC motor TM310.
# *** Pwm Pin Numbers and List ***
pwmPinNum0 = 0 #GP0
pwmPinNum1 = 1 #GP1
pwmPinNum2 = 2 #GP2
pwmPinNum3 = 3 #GP3
pwmPinNumList = [pwmPinNum0, pwmPinNum1, pwmPinNum2, pwmPinNum3]
pwmPinNumDict = {
'0': 0,
'1': 1,
'2': 2,
'3': 3,
}
# *** Pwm Pin Objects and List ***
pwmPin0 = PWM(Pin(pwmPinNum0))
pwmPin1 = PWM(Pin(pwmPinNum1))
pwmPin2 = PWM(Pin(pwmPinNum2))
pwmPin3 = PWM(Pin(pwmPinNum3))
pwmPinList01 = [pwmPin0, pwmPin1, pwmPin2, pwmPin3]
pwmPinDict = {'0': pwmPin0,
'1': pwmPin1,
'2': pwmPin2,
'3': pwmPin3,
}
# *** Defualt Frequency and Duty Cycle ***
defaultPwmFreq = 1000
defaultPwmDutyCycle = 50
# *** Initializing Pwm Pin Objects and List ***
def setPwmFreq(pwmPin, pwmFreq):
pwmPin.freq(pwmFreq)
return
def setPwmDutyCycle(pwmPin, dutyCycle):
u16DutyCycle = int((dutyCycle / 100) * 65536)
pwmPin.duty_u16(u16DutyCycle)
return
def setupPwmPinNumList(pwmPinNumList, pwmFreqList, pwmDutyCycleList):
print(' setupPwmPinNumList(), ...')
print(' pwmPinNumList =', pwmPinNumList)
print(' pwmFreqList =', pwmFreqList)
print(' pwmDutyCycleList =', pwmDutyCycleList)
for index in range(len(pwmPinNumList)):
pwmPin = pwmPinDict[str(index)]
setPwmFreq(pwmPin, pwmFreqList[index])
setPwmDutyCycle(pwmPin, pwmDutyCycleList[index])
return
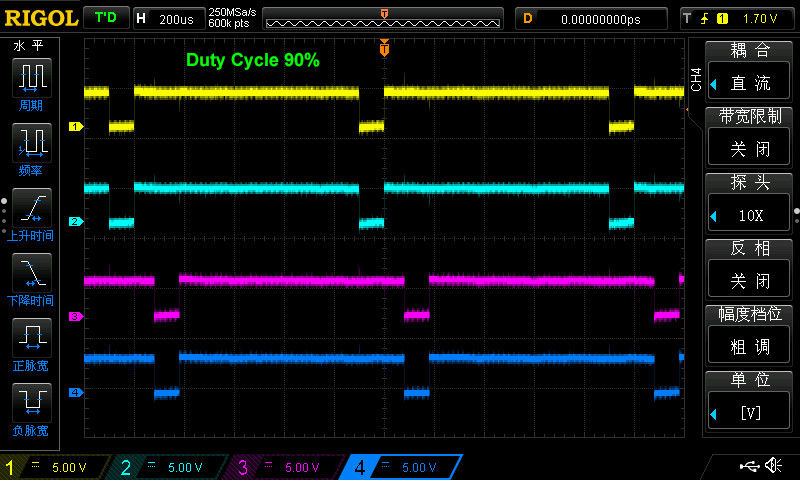
def testSetupPwmPinNumList():
setupPwmPinNumList(pwmPinNumList = [0, 1, 2, 3], pwmFreqList = [1000, 1000, 1000, 1000],
pwmDutyCycleList = [90, 90, 90, 90])
return
# Sample test ***
#testSetupPwmPinNumList()
# *** Main Tests ***
setupPwmPinNumList(pwmPinNumList = [0, 1, 2, 3],
pwmFreqList = [1000, 1000, 1000, 1000],
pwmDutyCycleList = [50, 50, 50, 50])
repeatCountIntPinNumListIntOneTenthSecond(intPinNumList = [0, 1, 2, 3], repeatTimes = 20, pauseTime = 0.2)
# *** End ***
# *** Sample Output tlfong01 2021oct04hkt1657 ***
'''
>>> %Run -c $EDITOR_CONTENT
setupPwmPinNumList(), ...
pwmPinNumList = [0, 1, 2, 3]
pwmFreqList = [1000, 1000, 1000, 1000]
pwmDutyCycleList = [50, 50, 50, 50]
testCountIntPinNumListIntOneTenthSecond()
ppsList = [32, 24, 28, 25] , min 24 , max 32 , dif 8 , avg 27
ppsList = [39, 26, 29, 23] , min 23 , max 39 , dif 16 , avg 29
ppsList = [31, 28, 28, 21] , min 21 , max 31 , dif 10 , avg 27
ppsList = [31, 28, 26, 16] , min 16 , max 31 , dif 15 , avg 25
ppsList = [31, 26, 34, 22] , min 22 , max 34 , dif 12 , avg 28
ppsList = [29, 26, 27, 19] , min 19 , max 29 , dif 10 , avg 25
ppsList = [28, 28, 24, 20] , min 20 , max 28 , dif 8 , avg 25
ppsList = [30, 24, 24, 28] , min 24 , max 30 , dif 6 , avg 26
ppsList = [33, 27, 18, 22] , min 18 , max 33 , dif 15 , avg 25
ppsList = [31, 26, 24, 19] , min 19 , max 31 , dif 12 , avg 25
ppsList = [28, 22, 25, 22] , min 22 , max 28 , dif 6 , avg 24
ppsList = [32, 21, 27, 32] , min 21 , max 32 , dif 11 , avg 28
ppsList = [34, 23, 27, 22] , min 22 , max 34 , dif 12 , avg 26
ppsList = [28, 24, 25, 20] , min 20 , max 28 , dif 8 , avg 24
ppsList = [36, 23, 31, 21] , min 21 , max 36 , dif 15 , avg 27
ppsList = [32, 26, 26, 23] , min 23 , max 32 , dif 9 , avg 26
ppsList = [32, 27, 23, 23] , min 23 , max 32 , dif 9 , avg 26
ppsList = [32, 24, 26, 23] , min 23 , max 32 , dif 9 , avg 26
ppsList = [30, 23, 30, 27] , min 23 , max 30 , dif 7 , avg 27
ppsList = [33, 26, 28, 23] , min 23 , max 33 , dif 10 , avg 27
>>>
'''
# *** End of Sample Output ***
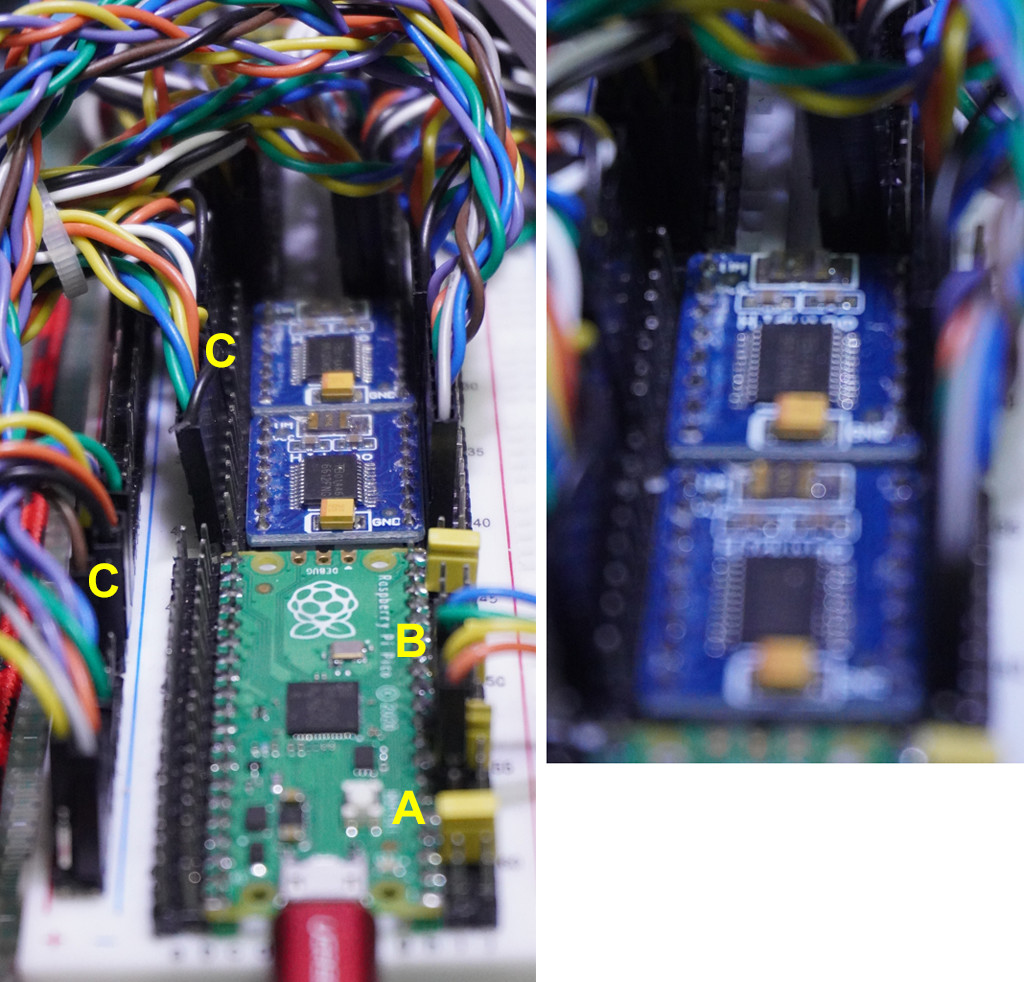
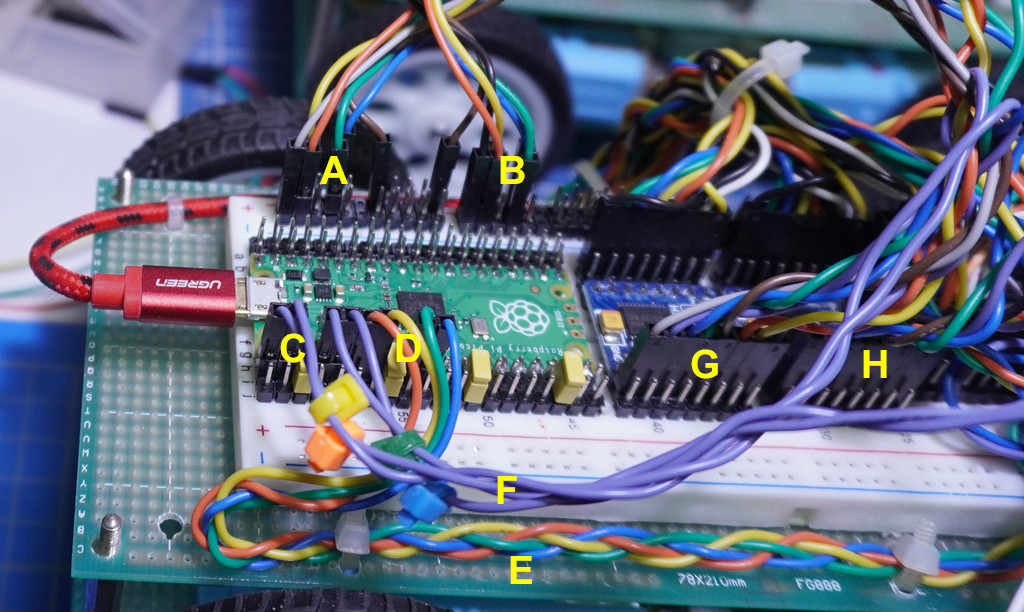
Pico Running Out of Pins
Pico is now running out of pins. I need to consider using GPIO Extenders, such as MCP23017, MCP23s17 etc.
pwmPinNum0 = 0 #GP0
pwmPinNum1 = 1 #GP1
pwmPinNum2 = 2 #GP2
pwmPinNum3 = 3 #GP3
intPinNum0 = 4 #GP4
intPinNum1 = 5 #GP5
intPinNum2 = 6 #GP6
intPinNum3 = 7 #GP7
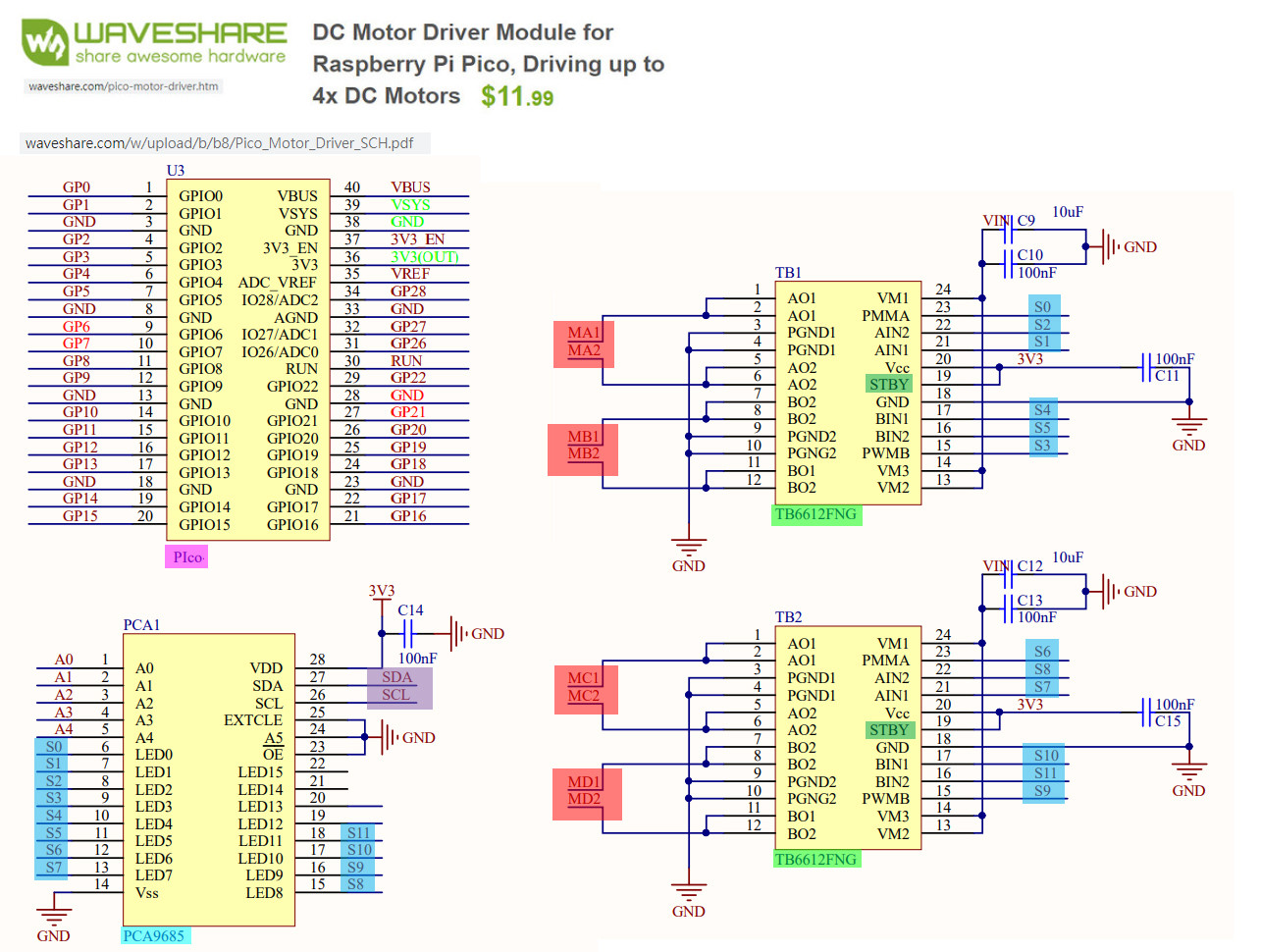
picoMotorDriverGpPinNumDict = { \
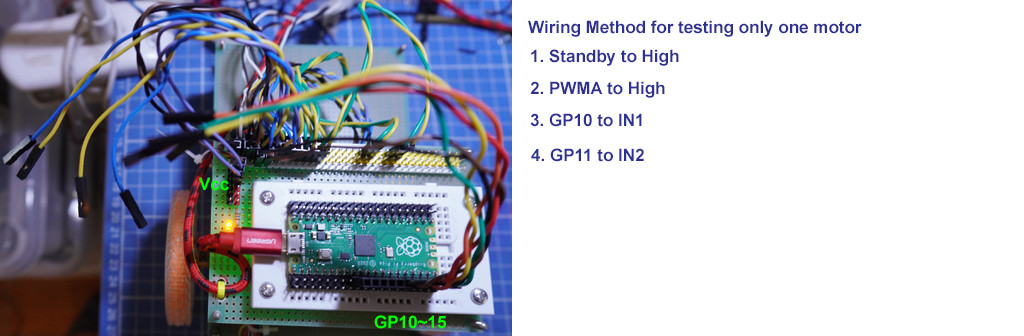
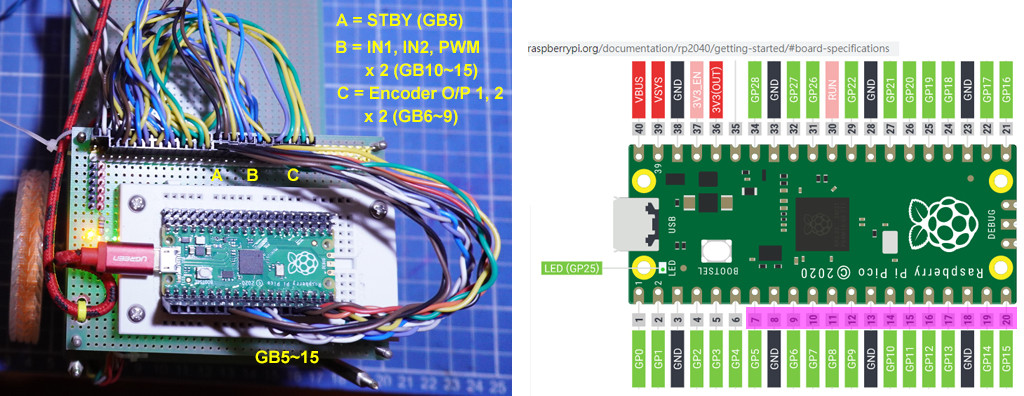
'0': {'StdByPinNum1': 8, #GP 8
'StdByPinNum2': 9, #GP 9
'AinPinNum1' : 10, #GP 10
'AinPinNum2' : 11, #GP 11
'PwmPinNum1' : 12, #GP 12
'BinPinNum1' : 13, #GP 13
'BinPinNum2' : 14, #GP 14
'PwmPinNum2' : 15, #GP 15
}
'1': {'StdByPinNum1': 16, #GP 16
'StdByPinNum2': 17, #GP 17
'AinPinNum1' : 18, #GP 18
'AinPinNum2' : 19, #GP 19
'PwmPinNum1' : 20, #GP 20
'BinPinNum1' : 21, #GP 21
'BinPinNum2' : 22, #GP 22
'PwmPinNum2' : 26, #GP 23
},
}
Complete Program Listing
# *** pwm_int_49.py - pwm and interrupt testing, tlfong01, 2021oct07hkt1542 ***
from machine import Pin, PWM
import utime
# ========= ========= ========= ========= ========= ========= ========= =========
# ========= ========= ========= ========= ========= ========= ========= =========
# Conents
#
# Part 1 - Interrupt Functions
# 1.1 Using GP4, 5, 6, 7 input pins to detect and count mtor encoder A signals and calculate motor speed
# Part 2 - PWM Functions
# 2.1 Using PWM pin to fade in and fade out the system LED
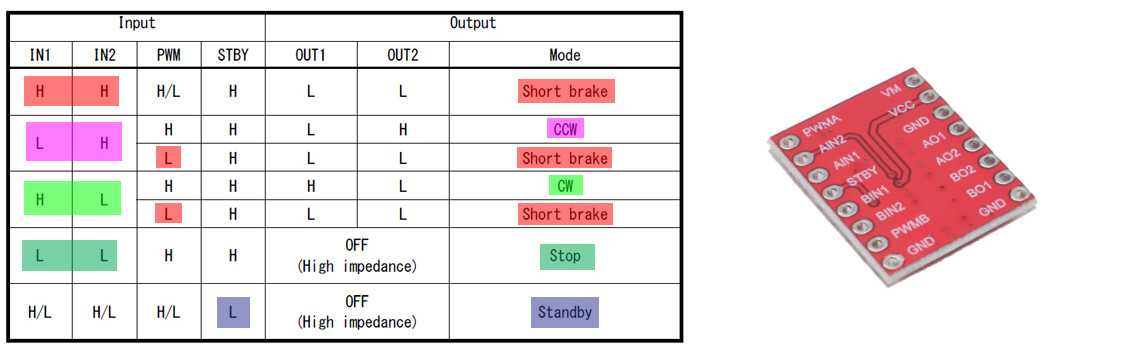
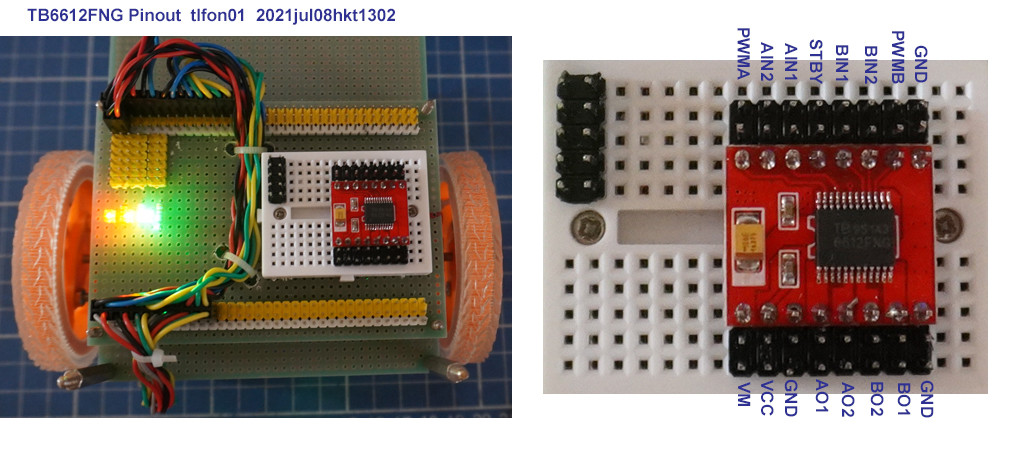
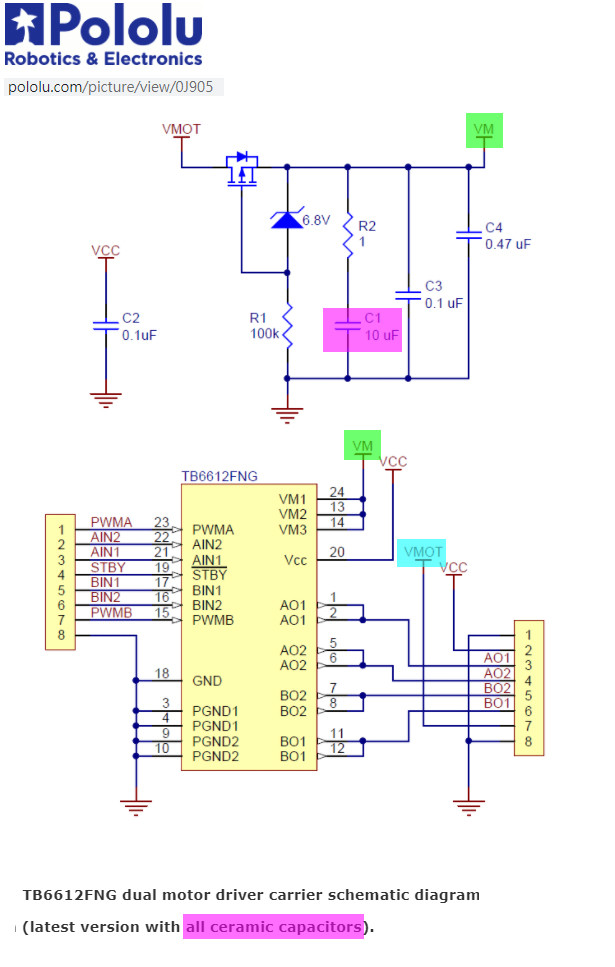
# 2.2 Using GP 0, 1, 2, 3 pins' PWM signals to control the speed of TB6612FNG driving TM310 DC motor
# Part 3 - TB6612FNG MotorDriver Functions
# 3.1 Setting up TB6612FNG motor drivers
# ========= ========= ========= ========= ========= ========= ========= =========
# ========= ========= ========= ========= ========= ========= ========= =========
# *** Part 1 - Interrupt Functions ***
# Interrupt functions for multiple (4) interrupt pins GP 4, 5, 6, 7 ***
intPinNum0 = 4 #GP4
intPinNum1 = 5 #GP5
intPinNum2 = 6 #GP6
intPinNum3 = 7 #GP7
picoIntGpPinNumDict = {'0': 4, # GP4
'1': 5, # GP5
'2': 6, # GP6
'3': 7, # GP7
}
intPinNumList = [intPinNum0, intPinNum1, intPinNum2, intPinNum3]
intPin0 = Pin(intPinNum0, Pin.IN, Pin.PULL_DOWN)
intPin1 = Pin(intPinNum1, Pin.IN, Pin.PULL_DOWN)
intPin2 = Pin(intPinNum2, Pin.IN, Pin.PULL_DOWN)
intPin3 = Pin(intPinNum3, Pin.IN, Pin.PULL_DOWN)
intPinDict = {
'0': intPin0,
'1': intPin1,
'2': intPin2,
'3': intPin3,
}
global intCount0
global intCount1
global intCount2
global intCount3
intCount0 = 0
intCount1 = 0
intCount2 = 0
intCount3 = 0
intCountDict = {
'0': intCount0,
'1': intCount1,
'2': intCount2,
'3': intCount3,
}
def intCallBack0(pin):
global intCount0
intCount0 = intCount0 + 1
return
def intCallBack1(pin):
global intCount1
intCount1 = intCount1 + 1
return
def intCallBack2(pin):
global intCount2
intCount2 = intCount2 + 1
return
def intCallBack3(pin):
global intCount3
intCount3 = intCount3 + 1
return
intCallBackDict = {
'0': intCallBack0,
'1': intCallBack1,
'2': intCallBack2,
'3': intCallBack3,
}
intPin0.irq(intCallBack0, Pin.IRQ_FALLING)
intPin1.irq(intCallBack1, Pin.IRQ_FALLING)
intPin2.irq(intCallBack2, Pin.IRQ_FALLING)
intPin3.irq(intCallBack3, Pin.IRQ_FALLING)
def countIntPinIntPeriod(intPinNum, countPeriod):
global intCount0
global intCount1
global intCount2
global intCount3
intCount0 = 0
intCount1 = 0
intCount2 = 0
intCount3 = 0
utime.sleep(countPeriod)
if intPinNum == 0:
intCount = intCount0
elif intPinNum == 1:
intCount = intCount1
elif intPinNum == 2:
intCount = intCount2
else:
intCount = intCount3
return intCount
def countIntPinNumListIntPeriod(intPinNumList, countPeriod):
intCountList = [0] * len(intPinNumList)
for index in range(len(intPinNumList)):
intCountList[index] = countIntPinIntPeriod(intPinNumList[index], countPeriod)
return intCountList
# *** Test functions ***
def repeatCountIntPinNumListIntPeriod(intPinNumList, countPeriod, pauseTime, repeatTimes):
print('\n countIntPinNumListIntPeriod()')
picoIntGpPinNumList = [0] * len(intPinNumList)
for index in range(len(picoIntGpPinNumList)):
picoIntGpPinNumList[index] = picoIntGpPinNumDict[str(index)]
print(' intPinNumList =', intPinNumList)
print(' picoIntGpPinNumList =', picoIntGpPinNumList)
print(' countPeriod (seconds) =', countPeriod)
print(' pauseTime (seconds) =', pauseTime)
print(' repeat count times =', repeatTimes)
print('')
for count in range(repeatTimes):
ppsList = countIntPinNumListIntPeriod(intPinNumList, countPeriod)
print(' ppsList =', ppsList, end = '')
print(' , min ', min(ppsList), end = '')
print(' , max ', max(ppsList), end = '')
print(' , dif ', max(ppsList) - min(ppsList), end = '')
print(' , avg ', int(sum(ppsList) / len(ppsList)))
'''
rpmList = ppsList.copy()
for index in range(len(rpmList)):
rpmList[index] = int(((rpmList[index] / 12) / 90) * 10 * 60)
print(' rpmList =', rpmList, end = '')
print(' , min ', min(rpmList), end = '')
print(' , max ', max(rpmList), end = '')
print(' , avg ', int(sum(rpmList) / len(rpmList)))
'''
utime.sleep(pauseTime)
return
# *** Sample Test ***
# ...
# ========= ========= ========= ========= ========= ========= ========= =========
# ========= ========= ========= ========= ========= ========= ========= =========
# *** Part 2 - PWM Functions ***
def pwmSystemLed():
systemLedPinNum = 25
pwmPin = PWM(Pin(systemLedPinNum))
pwmPin.freq(1000)
for count in range(4):
for dutyCycle in range(65025):
pwmPin.duty_u16(dutyCycle)
utime.sleep(0.0001)
for dutyCycle in range(65025, 0, -1):
pwmPin.duty_u16(dutyCycle)
utime.sleep(0.0001)
return
def testPwmSystemLed():
print('testPwmSystemLed(), ...')
print(' System LED now fades in and out a couple of times')
pwmSystemLed()
print(' End of test.')
return
# *** Sample Test ***
#testPwmSystemLed()
# ========= ========= ========= ========= ========= ========= ========= =========
# ========= ========= ========= ========= ========= ========= ========= =========
# *** Setup 4 PWM Pins ***
# Notes:
# 1. Setting up GP 0, 1, 2, 3 as pwm pins at 1 kHz, 50% duty cycle
# 2. Connecting the pwm pins to the pwm inputs of TB6612FNG move the DC motor TM310.
# *** Pwm Pin Numbers and List ***
pwmPinNum0 = 0 #GP0
pwmPinNum1 = 1 #GP1
pwmPinNum2 = 2 #GP2
pwmPinNum3 = 3 #GP3
pwmPinNumList = [pwmPinNum0, pwmPinNum1, pwmPinNum2, pwmPinNum3]
picoPwmGpPinNumDict = {
'0': 0,
'1': 1,
'2': 2,
'3': 3,
}
# *** Pwm Pin Objects and List ***
pwmPin0 = PWM(Pin(pwmPinNum0))
pwmPin1 = PWM(Pin(pwmPinNum1))
pwmPin2 = PWM(Pin(pwmPinNum2))
pwmPin3 = PWM(Pin(pwmPinNum3))
pwmPinList01 = [pwmPin0, pwmPin1, pwmPin2, pwmPin3]
pwmPinDict = {'0': pwmPin0,
'1': pwmPin1,
'2': pwmPin2,
'3': pwmPin3,
}
# *** Defualt Frequency and Duty Cycle ***
defaultPwmFreq = 1000
defaultPwmDutyCycle = 50
# *** Initializing Pwm Pin Objects and List ***
def setPwmFreq(pwmPin, pwmFreq):
pwmPin.freq(pwmFreq)
return
def setPwmDutyCycle(pwmPin, dutyCycle):
u16DutyCycle = int((dutyCycle / 100) * 65536)
pwmPin.duty_u16(u16DutyCycle)
return
def setupPwmPinNumList(pwmPinNumList, pwmFreqList, pwmDutyCycleList):
picoPwmGpPinNumList = [0] * len(pwmPinNumList)
for index in range(len(picoPwmGpPinNumList)):
picoPwmGpPinNumList[index] = picoPwmGpPinNumDict[str(index)]
print(' setupPwmPinNumList(), ...')
print(' pwmPinNumList =', pwmPinNumList)
print(' Pico GP pin num list =', picoPwmGpPinNumList)
print(' pwmFreqList =', pwmFreqList)
print(' pwmDutyCycleList =', pwmDutyCycleList)
for index in range(len(pwmPinNumList)):
pwmPin = pwmPinDict[str(index)]
setPwmFreq(pwmPin, pwmFreqList[index])
setPwmDutyCycle(pwmPin, pwmDutyCycleList[index])
return
def testSetupPwmPinNumList():
setupPwmPinNumList(pwmPinNumList = [0, 1, 2, 3], pwmFreqList = [1000, 1000, 1000, 1000],
pwmDutyCycleList = [90, 90, 90, 90])
return
# Sample test ***
#testSetupPwmPinNumList()
# ========= ========= ========= ========= ========= ========= ========= =========
# ========= ========= ========= ========= ========= ========= ========= =========
# *** Part 3 - TB6612FNG Motor Driver Functions ***
picoMotorDriverGpPinNumDict = { \
'0': {'StdByPinNum1': 8, #GP 8
'StdByPinNum2': 9, #GP 9
'AinPinNum1' : 10, #GP 10
'AinPinNum2' : 11, #GP 11
'PwmPinNum1' : 12, #GP 12
'BinPinNum1' : 13, #GP 13
'BinPinNum2' : 14, #GP 14
'PwmPinNum2' : 15, #GP 15
}
'1': {'StdByPinNum1': 16, #GP 16
'StdByPinNum2': 17, #GP 17
'AinPinNum1' : 18, #GP 18
'AinPinNum2' : 19, #GP 19
'PwmPinNum1' : 20, #GP 20
'BinPinNum1' : 21, #GP 21
'BinPinNum2' : 22, #GP 22
'PwmPinNum2' : 26, #GP 23
},
}
# ========= ========= ========= ========= ========= ========= ========= =========
# ========= ========= ========= ========= ========= ========= ========= =========
# *** Old Main Tests ***
# *** Old Tests V1 2021oct07hkt1545 ***
def moveFourMotorsV1():
setupPwmPinNumList(pwmPinNumList = [0, 1, 2, 3],
pwmFreqList = [1000, 1000, 1000, 1000],
pwmDutyCycleList = [50, 50, 50, 50])
return
def checkFourMotorsV1():
repeatCountIntPinNumListIntPeriod(intPinNumList = [0, 1, 2, 3],
countPeriod = 0.1,
pauseTime = 0.2,
repeatTimes = 4,)
return
# ***Old tests ***
moveFourMotorsV1()
checkFourMotorsV1()
# *** Main Tests ***
#testSetupMotorDriverList(motorDriverNumList)
# *** End ***
# *** Sample Output tlfong01 2021oct04hkt1657 ***
# *** End of Sample Output ***
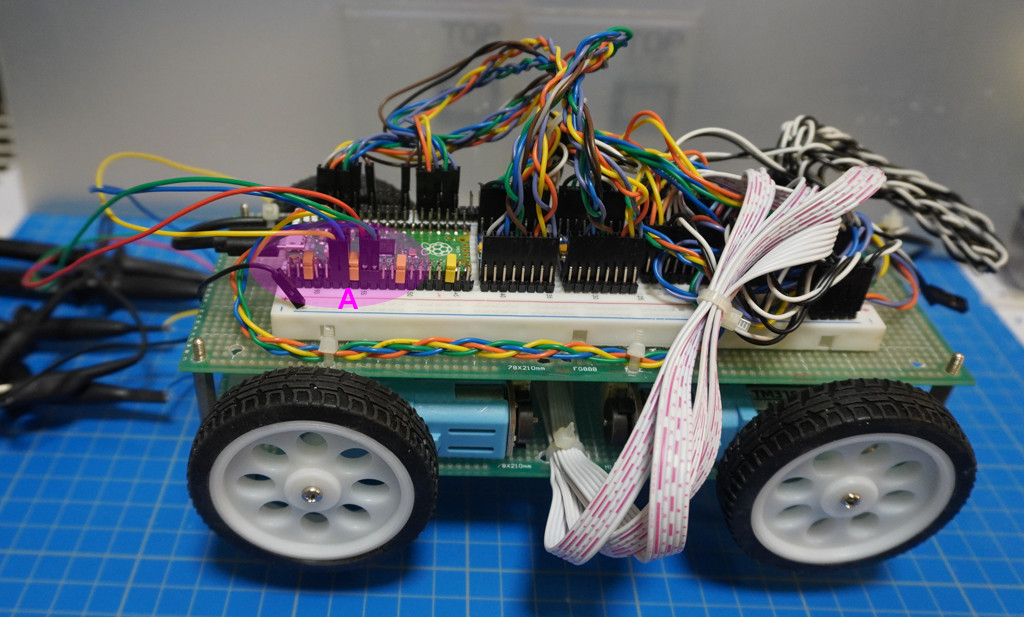
Moving and Stopping 4 Motors
Now I have written functions to move and start 4 motors.
def testStartAndStopMovingFourMotors():
print('Start moving 4 motors, ...')
setupMotorDriverChannel(motorDriverNum = 0, channelNum = 0)
setupMotorDriverChannel(motorDriverNum = 0, channelNum = 1)
setupMotorDriverChannel(motorDriverNum = 1, channelNum = 0)
setupMotorDriverChannel(motorDriverNum = 1, channelNum = 1)
utime.sleep(4)
print('Stop moving 4 motors.')
stopMotorDriverChannel(motorDriverNum = 0, channelNum = 0)
stopMotorDriverChannel(motorDriverNum = 0, channelNum = 1)
stopMotorDriverChannel(motorDriverNum = 1, channelNum = 0)
stopMotorDriverChannel(motorDriverNum = 1, channelNum = 1)
return
And this is the partial listing of the code.
# *** pico_4wd_v61.py - tlfong01, 2021oct09hkt1534 ***
from machine import Pin, PWM
import utime
# ========= ========= ========= ========= ========= ========= ========= =========
# ========= ========= ========= ========= ========= ========= ========= =========
# Conents
#
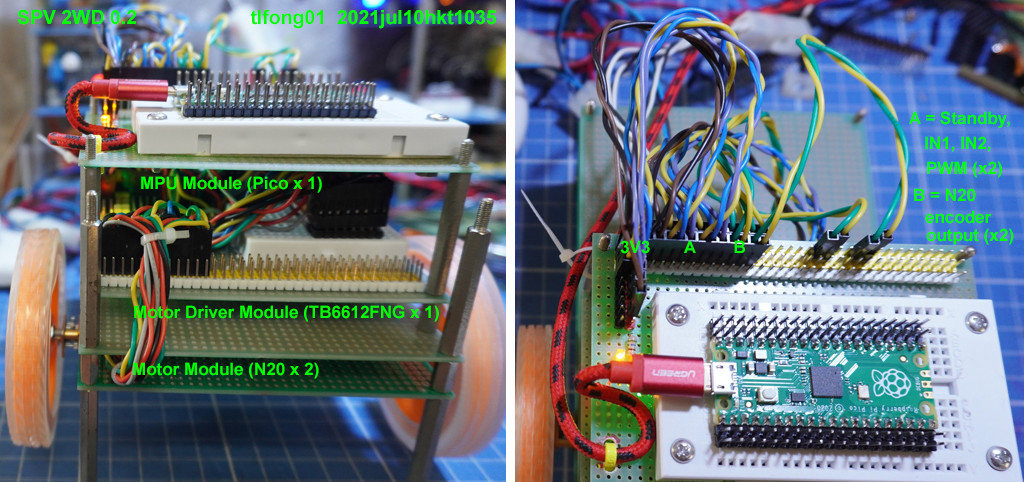
# Part 1 - Measure 4WD Motor Speeds
# 1.1 Using GP4, 5, 6, 7 input pins to detect and count mtor encoder A signals and calculate motor speed
# Part 2 - Change 4WD Speed and Direction
# 2.1 Using PWM pin to fade in and fade out the system LED
# 2.2 Using GP 0, 1, 2, 3 pins' PWM signals to control the speed of TB6612FNG driving TM310 DC motor
# Part 3 - Setup 4WD Motor Drivers
# 3.1 Setting up TB6612FNG motor drivers
# ========= ========= ========= ========= ========= ========= ========= =========
# ========= ========= ========= ========= ========= ========= ========= =========
# *** Part 3 - TB6612FNG Motor Driver Functions ***
stdByPinNum0 = 8
stdByPinNum1 = 9
aIn1PinNum0 = 10
aIn2PinNum0 = 11
aPwmPinNum0 = 0
bIn1PinNum0 = 12
bIn2PinNum0 = 13
bPwmPinNum0 = 1
aIn1PinNum1 = 14
aIn2PinNum1 = 15
aPwmPinNum1 = 2
bIn1PinNum1 = 16
bIn2PinNum1 = 17
bPwmPinNum1 = 3
motorDriverGpPinNumDict = { \
'0': {'StdByPinNum' : stdByPinNum0,
'0' : {'In1PinNum' : aIn1PinNum0,
'In2PinNum' : aIn2PinNum0,
'PwmPinNum' : aPwmPinNum0,
},
'1' : {'In1PinNum' : bIn1PinNum0,
'In2PinNum' : bIn2PinNum0,
'PwmPinNum' : bPwmPinNum0,
},
},
'1': {'StdByPinNum' : stdByPinNum1,
'0' : {'In1PinNum' : aIn1PinNum1,
'In2PinNum' : aIn2PinNum1,
'PwmPinNum' : aPwmPinNum1,
},
'1' : {'In1PinNum' : bIn1PinNum1,
'In2PinNum' : bIn2PinNum1,
'PwmPinNum' : bPwmPinNum1,
},
},
}
def setupMotorDriverChannel(motorDriverNum, channelNum):
stdByPinNum = motorDriverGpPinNumDict[str(motorDriverNum)]['StdByPinNum']
in1PinNum = motorDriverGpPinNumDict[str(motorDriverNum)][str(channelNum)]['In1PinNum']
in2PinNum = motorDriverGpPinNumDict[str(motorDriverNum)][str(channelNum)]['In2PinNum']
pwmPinNum = motorDriverGpPinNumDict[str(motorDriverNum)][str(channelNum)]['PwmPinNum']
stdByPin = Pin(stdByPinNum, Pin.OUT)
in1Pin = Pin(in1PinNum, Pin.OUT)
in2Pin = Pin(in2PinNum, Pin.OUT)
pwmPin = Pin(pwmPinNum, Pin.OUT)
stdByPin.high()
in1Pin.low()
in2Pin.high()
pwmPin.high()
return
def stopMotorDriverChannel(motorDriverNum, channelNum):
stdByPinNum = motorDriverGpPinNumDict[str(motorDriverNum)]['StdByPinNum']
in1PinNum = motorDriverGpPinNumDict[str(motorDriverNum)][str(channelNum)]['In1PinNum']
in2PinNum = motorDriverGpPinNumDict[str(motorDriverNum)][str(channelNum)]['In2PinNum']
pwmPinNum = motorDriverGpPinNumDict[str(motorDriverNum)][str(channelNum)]['PwmPinNum']
stdByPin = Pin(stdByPinNum, Pin.OUT)
in1Pin = Pin(in1PinNum, Pin.OUT)
in2Pin = Pin(in2PinNum, Pin.OUT)
pwmPin = Pin(pwmPinNum, Pin.OUT)
stdByPin.high()
in1Pin.high()
in2Pin.high()
pwmPin.high()
return
def testStartAndStopMovingFourMotors():
print('Start moving 4 motors, ...')
setupMotorDriverChannel(motorDriverNum = 0, channelNum = 0)
setupMotorDriverChannel(motorDriverNum = 0, channelNum = 1)
setupMotorDriverChannel(motorDriverNum = 1, channelNum = 0)
setupMotorDriverChannel(motorDriverNum = 1, channelNum = 1)
utime.sleep(4)
print('Stop moving 4 motors.')
stopMotorDriverChannel(motorDriverNum = 0, channelNum = 0)
stopMotorDriverChannel(motorDriverNum = 0, channelNum = 1)
stopMotorDriverChannel(motorDriverNum = 1, channelNum = 0)
stopMotorDriverChannel(motorDriverNum = 1, channelNum = 1)
return
# ***
testStartAndStopMovingFourMotors()
# ========= ========= ========= ========= ========= ========= ========= =========
# ========= ========= ========= ========= ========= ========= ========= =========
# *** Old Main Tests ***
# *** Old Tests V1 2021oct07hkt1545 ***
def pwmChange4MotorSpeeds():
setupPwmPinNumList(pwmPinNumList = [0, 1, 2, 3],
pwmFreqList = [1000, 1000, 1000, 1000],
pwmDutyCycleList = [50, 50, 50, 50])
return
def intMeasure4MotorSpeeds():
repeatCountIntPinNumListIntPeriod(intPinNumList = [0, 1, 2, 3],
countPeriod = 0.1,
pauseTime = 0.2,
repeatTimes = 4,)
return
# ***Sample Tests ***
#pwmChange4MotorSpeeds()
#intMeasure4MotorSpeeds()
# *** Main Tests ***
testStartAndStopMovingFourMotors()
#utime.sleep(2)
# *** End ***
# *** Sample Output tlfong01 2021oct04hkt1657 ***
# *** End of Sample Output ***
/ to continue, …




 ). One good such example has limit of time calculation less than 500us, but N20 motor’s timing is of the order of 600uS, in other words, just NOT make. I am too lazy to modify my demo programs to it my N20 applications. So lazy me go to Tom’s Hardware for help. I remember Tom;s Hardware has developed a big number of tutorials for newbies, as listed below.
). One good such example has limit of time calculation less than 500us, but N20 motor’s timing is of the order of 600uS, in other words, just NOT make. I am too lazy to modify my demo programs to it my N20 applications. So lazy me go to Tom’s Hardware for help. I remember Tom;s Hardware has developed a big number of tutorials for newbies, as listed below.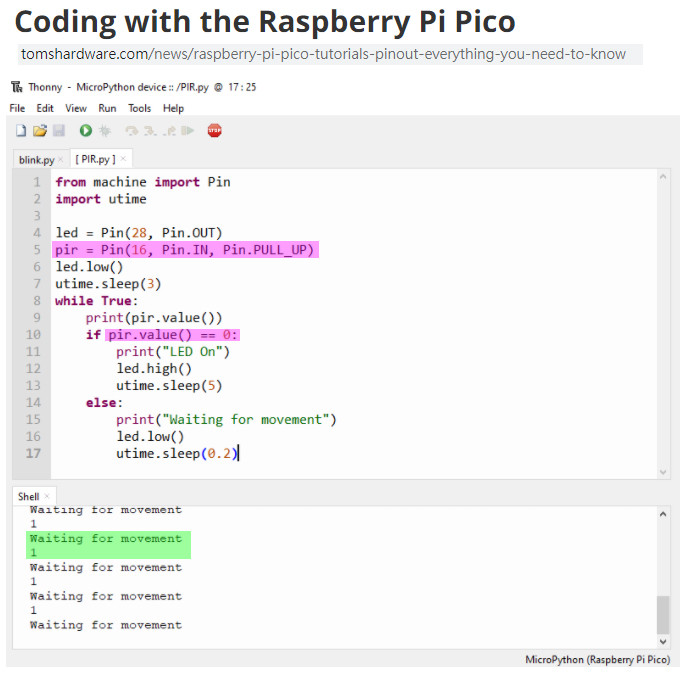

























{kind=link}
{kind=link}
{kind=link}