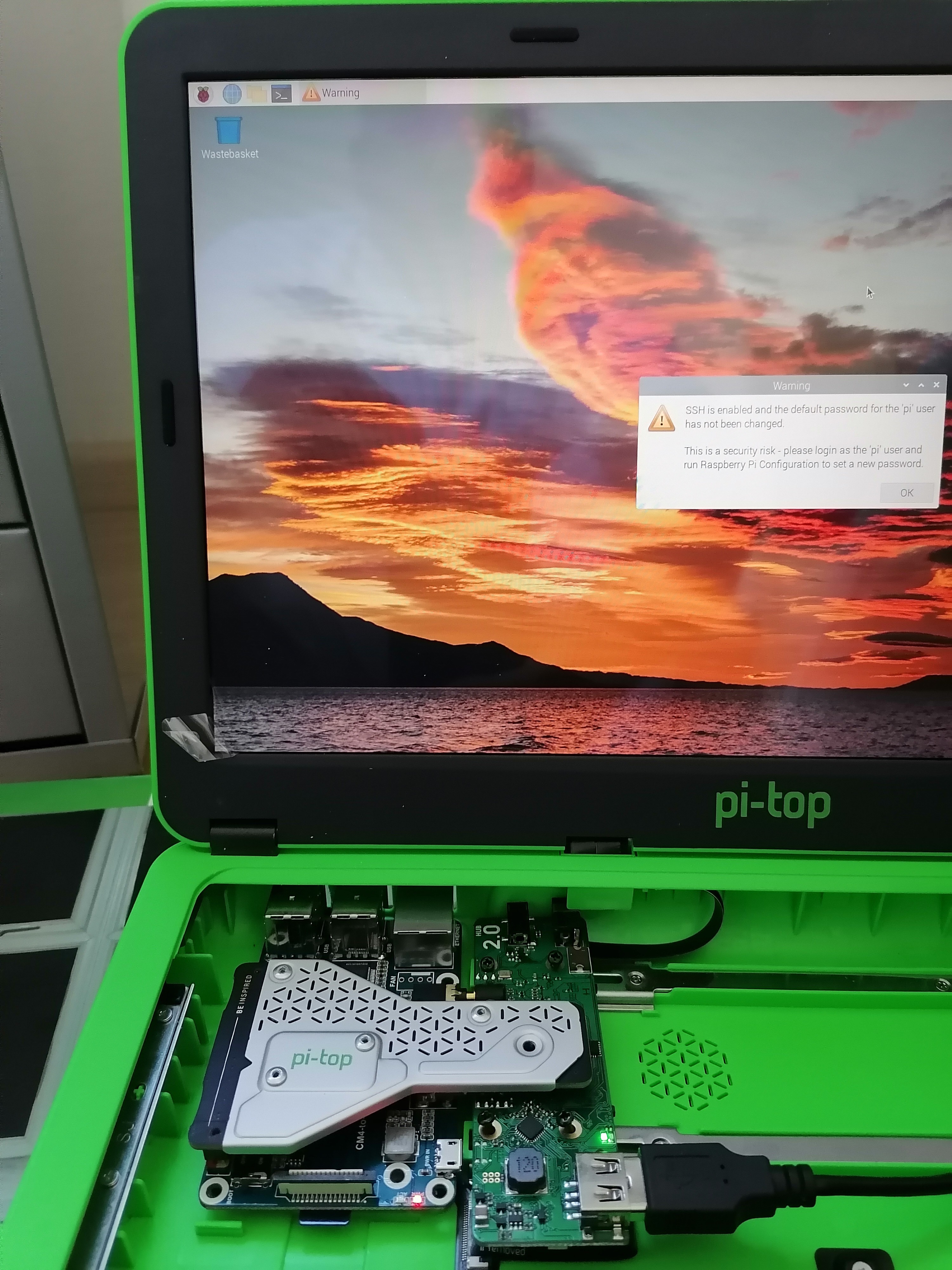
So here are some more pictures of my SteroidPi-top [3] - which is running latest 5.15.61 64-bit Raspberry Bullseye OS now
Cut a hole in the bottom of the Pi-Top chassis. USB connectors were cut out from their position. Used a sharp knife and cut careful from the outside. Wanted to use a different CM4 carrier board first which only has USB sockets at the center position.
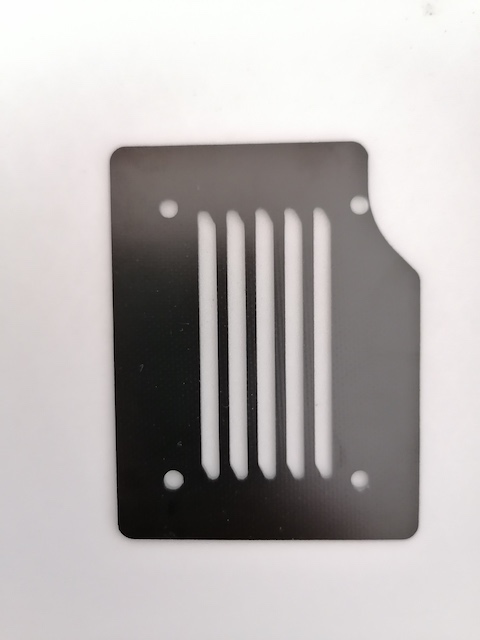
Milled a plate from 1.0mm GFK to cover the hole. Fixed in position by double sided adhesive. The CM4 mounting holes were use for aligning it.
Hole closed again. Cover does not protrude.
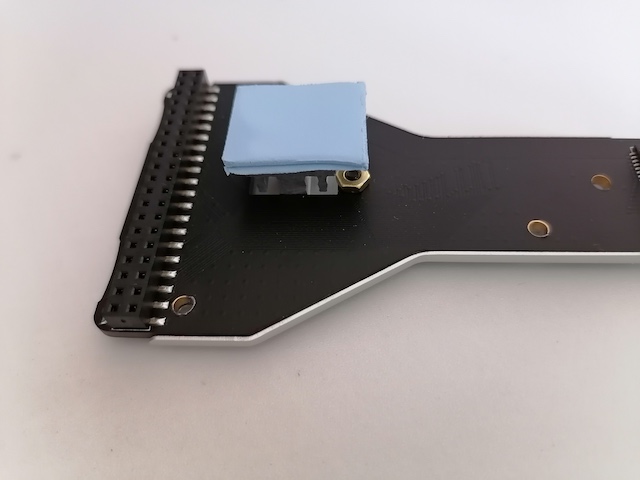
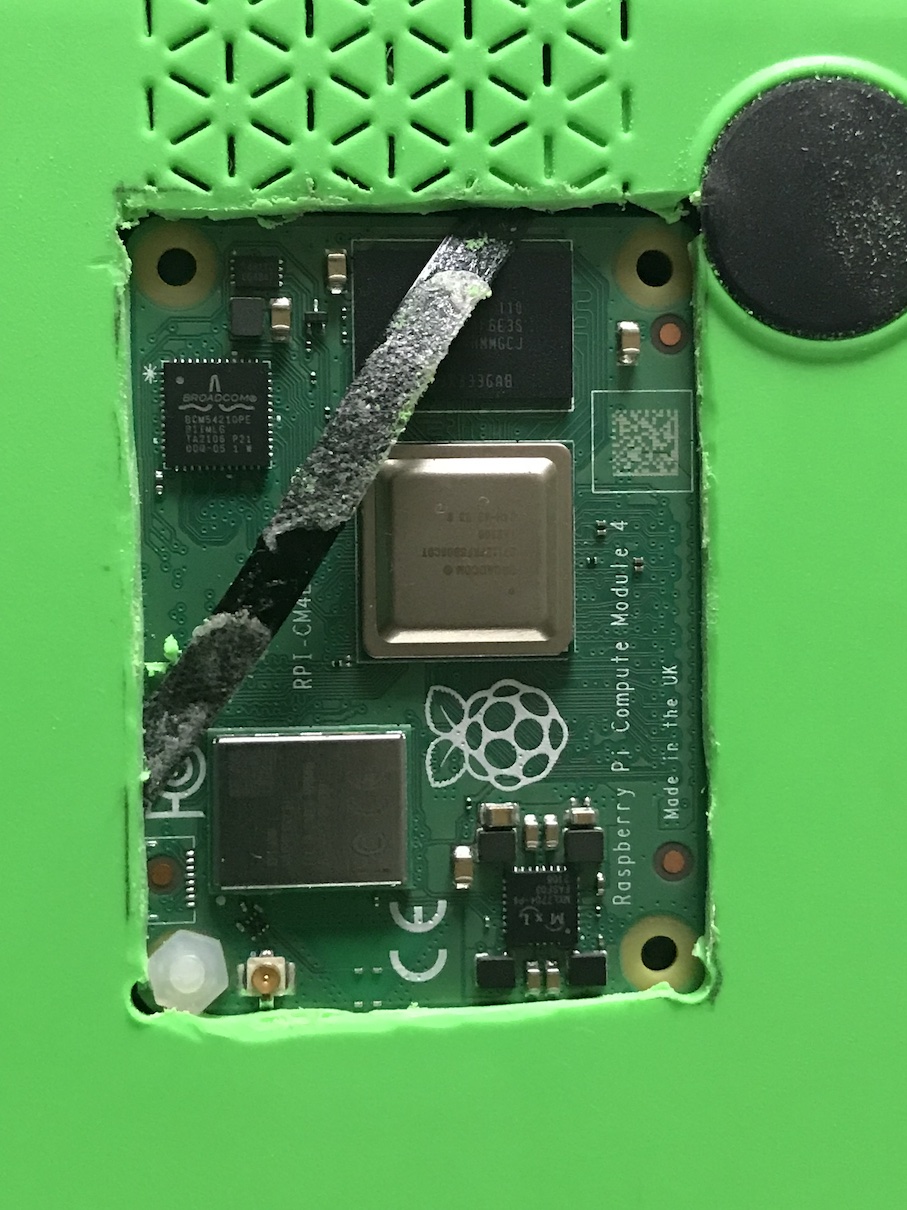
Thought the cooler is of no use as it’s not touching the SOC. When compiling the Linux kernel I’ve noted throttling of the SOC and decided to attach it again (now with M2.5 screws instead of rivets)
To make the cooler touch the Waveshare PCB two layers of 1.5mm TIM were added (sorry, did not measure the actual gap size; simply scherzend them in)

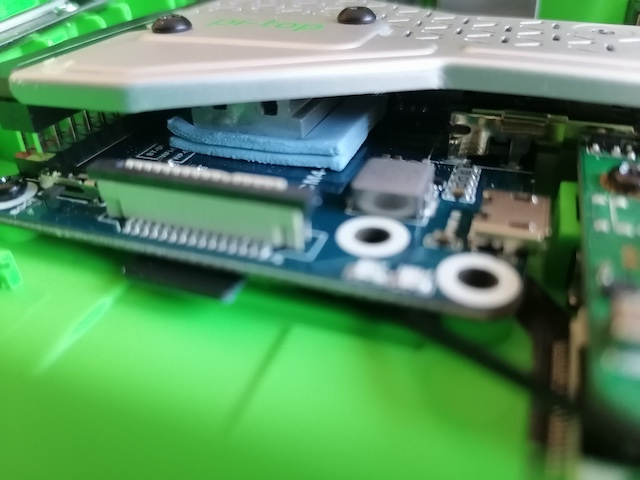
The cooler is now touching the board (no components in that position luckily and aids in cooling the device.
Warning: it’s getting warm to the touch when running on full load!